Robotik & autonome Systeme
-
Bildrückgeführte RoboterregelungZiel der Forschungsaktivitäten ist die bildunterstützte Regelung des auf MARGe montierten Roboterarms. Es soll erreicht werden, dass der Roboterarm autonom Objekte erkennt und durch eine geregelte Bewegung dazu in der Lage ist, das erkannte Objekt zu greifen.Team:Jahr: 2007Förderung: MZH Initiativprojekt
![]()
![]()
-
MARGeDer mobile Roboter MARGe (Mobile Autonomous Robot Genie) dient als Plattform zur Erprobung von Algorithmen zur Lokalisation, Bahnregelung und Vermeidung dynamischer Hindernisse. Die Plattform ist mit verschiedenen internen und externen Sensorsystemen, wie z.B. Encodern und Laserscannern, ausgestattet.Team:Jahr: 2008Förderung: MZH Initiativprojekt
![]()
![]()
-
PaLiDA - Parallelkinematik mit LineardirektantriebenDer Versuchsstand PaLiDA wird im Rahmen des DFG-Schwerpunktprogramm "Fertigungsmaschinen mit Parallekinematiken" am MZH genutzt. Durch dieses Vorhaben sollen die Vorteile der Kombination von paralleler Konstruktion und hochdynamsichen Antrieben ausgenutzt, untersucht und weiterentwickelt werden. Dies ermöglicht die zukünftige Nutzung von Parallelkinematiken in der industriellen Fertigung zur Steigerung der Produktivität.Team:Jahr: 2008Förderung: Deutsche Forschungsgemeinschaft
![]()
![]()
-
Energieoptimale Bahnplanung durch Ausnutzung natürlicher BewegungsmusterIn Fortsetzung der Forschungsarbeiten zu unteraktuierten Manipulatoren, bei denen die Bewegung passiver Gelenke über die dynamischen Kopplungen wie Trägheit, Coriolis- und Zentrifugalkräfte geschieht, sollen diese Kopplungen bewusst zu einer energieroptimalen Bahnplanung vollaktuierter Systeme ausgenutzt werden.Team:Jahr: 2009Förderung: Deutsche Forschungsgemeinschaft
![]()
![]()
-
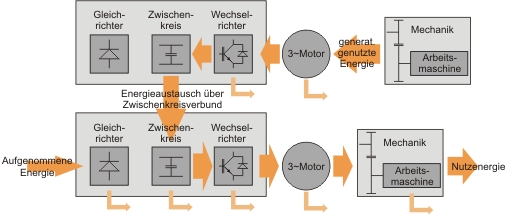
Planung energieeffizienter Trajektorien unter Ausnutzung von Energiespeichern und Energieaustausch zwischen elektrischen AntriebenIn Mehrachsanwendungen lassen sich die umrichterinternen Gleichstromzwischenkreise der Einzelachsen zusammenschalten, so dass hierdurch eine kurzzeitige Energiepufferung bzw. ein kontinuierlicher Energieaustausch zwischen den verwendeten Antrieben möglich ist. Auf dieser Grundlage sollen Möglichkeiten einer optimierten Trajektorienplanung zur Steigerung der Energieeffizienz untersucht werden.Team:Jahr: 2010Förderung: Deutsche Forschungsgemeinschaft (DFG)
![]()
![]()
-
Leistungssteigerung von Parallelrobotern mittels parametervariabler Strukturen basierend auf kinematischer RedundanzDas Ziel dieses Forschungsvorhabens ist es, den Bewegungsraum von Parallelkinematiken durch kinematische Redundanz zu vergrößern und gleichzeitig die Genauigkeit, Steifigkeit und Dynamik zu steigern. Neben geeigneten und aussagekräftigen Analyse- und Bewertungsmethodiken, sollen Verfahren zur optimalen Steuerung und Regelung parametervariabler Mechanismen entwickelt und praktisch angewendet werden.Team:Jahr: 2010Förderung: Deutsche Forschungsgemeinschaft (DFG)
![]()
![]()
-
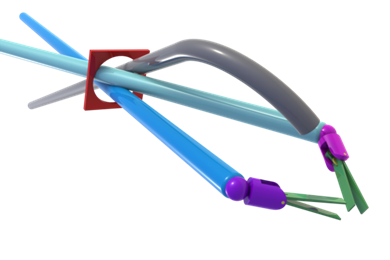
Entwicklung chirurgischer Instrumente für die Single-Port-LaparoskopieBei laparoskopischen Eingriffen wird die Bauchhöhle des Patienten durch einen kleinen Schnitt eröffnet. In den so geschaffenen Zugang wird ein Laparoskop eingeführt, um die inneren Organe auszuleuchten, optisch zu erfassen und dem Mediziner durch eine geeignete visuelle Darstellung anzuzeigen. Bei einer Single-Port Operation werden neben dem Laparoskop mindestens zwei weitere Instrumente zur Gewebemanipulation durch dieselbe Öffnung in die Bauchhöhle eingebracht. Erfolgt dieser Zugang im Bauchnabel ist die Narbe später kaum mehr zu erkennen. Neben dem daraus resultierenden guten kosmetischen Ergebnis, hat die Single-Port Laparoskopie die Vorteile eines geringen Blutverlustes und einer schnellen Genesung. Um das Einsatzgebiet für diese Operationstechnik zu erweitern werden neue medizintechnische Systeme benötigt. Diese sollen insbesondere eine hohe Beweglichkeit der Endeffektoren in einem großen kollisionsfreien Arbeitsraum besitzen.Team:Jahr: 2011
![]()
![]()
-
Modular strukturiertes Motion-Control-System für Robotik und HandlingIn diesem Projekt wird eine leicht bedienbare, modular strukturierte und damit flexible Plattform zur Ansteuerung unterschiedlichster Robotik-Anwendungen entwickelt. Neben etablierten Systemen, wie z.B. Scara-, Delta- oder Knickarm-Kinematiken, bieten unterschiedliche Schnittstellen die Möglichkeit, individuelle Kinematiken anzusteuern. Das Ziel ist die Vereinfachung der Programmierung und Inbetriebnahme komplexer, mehrachsiger Produktionsanlagen.Team:Jahr: 2012Förderung: Lenze Automation GmbH
![]()
![]()
-
Entwurf energieeffizienter mechatronischer Systeme durch Kopplung automatischer Steuerungssynthese und TrajektorienplanungDie Reduzierung des Energieverbrauchs ist ein großes Anliegen in industriellen Produktionssystemen. Ein Ansatz ist die Rückgewinnung der Bremsenergie von Roboterachsen. Im Rahmen dieses Projektes wird an einer automatisierte Methodik geforscht, welche aus drei Teilen besteht: Eine szenariobasierte Sprache zur flexiblen Spezifikation des diskreten Produktionssystemverhaltens, ein automatisiertes Verfahren zur Synthese optimaler Steuerstrategien aus solchen Spezifikationen, einschließlich der Generierung von SPS-Code, und ein Verfahren zur detaillierten Trajektorienoptimierung.Team:Jahr: 2013Förderung: Deutsche Forschungsgemeinschaft (DFG)
![]()
![]()
-
Automatische Generierung aufgabenoptimaler RoboterstrukturenUm den Automatisierungsprozess, insbesondere von klein- und mittelständischen Unternehmen, weiter voranzutreiben, wurde im Umfang dieses Forschungsprojektes eine neue Methodik zur aufgabenspezifischen Entwicklung seriellkinematischer Roboter erarbeitet. Ziel ist eine ganzheitliche und automatisierte Synthetisierung von seriellen Roboterstrukturen in Abhängigkeit eines benutzerdefinierten Anforderungsprofils.Team:Jahr: 2013Förderung: Administrative Department of Science, Technology, and Innovation of Colombia ("Colciencias")
![]()
![]()
-
Vollaktuierter elektromagnetischer Biegeaktor für endoskopische AnwendungenZiel dieses Projektes ist, die Nachteile bestehender Endoskop-Systeme, in Bezug auf Handhabung und Verletzungsrisiko für den Patienten, durch ein neuartiges Aktuierungskonzept zu kompensieren. Gegenstand der Untersuchung sind zunächst die Entwicklung geeigneter Aktoren, deren kinematische und dynamische Modellierung sowie die Implementierung einer geeigneten Steuerung und Regelung. Die Arbeit wird in enger Kooperation mit dem Institut für Antriebssysteme und Leistungselektronik (IAL) durchgeführt.Team:Jahr: 2013Förderung: DFG und Caroline Herschel Programm des Hochschulbüro für ChancenVielfaltLaufzeit: 2013-2019
![]()
![]()
-
"3. Arm" - Handwerker-Kraftassistenzsystem mit adaptiver Mensch-Technik-InteraktionDas Projektvorhaben widmet sich der Entwicklung eines Assistenzsystems zur Unterstützung bei Arbeiten mit schweren Elektrowerkzeugen. Grundlage ist dabei eine mechatronische Konstruktion ("3. Arm"), die am Körper des Nutzers über eine Tragekonstruktion befestigt ist. Neben der physischen Unterstützung erfüllt das System kognitive Assistenzfunktionen. Somit dient das System einerseits der Arbeitserleichterung (Reduktion der auf Arme und Schulter wirkenden Kräfte) und andererseits der Steigerung der Arbeitseffizienz und Arbeitsqualität.Team:Jahr: 2014Förderung: Bundesministerium für Bildung und Forschung (BMBF)Laufzeit: 3 Jahre
![]()
![]()
-
Energieeffiziente Bahnplanung für IndustrieroboterEine Möglichkeit zur Steigerung der Energieeffizienz eines Roboters besteht in der Planung energieoptimaler Bewegungen. Der Energieverbrauch wird durch verschiedene Effekte von der Bahnplanung beeinflusst, darunter z. B. betriebspunktabhängige Verluste der Antriebskomponenten sowie die elektrische und mechanische Kopplung der Antriebsachsen. Zur Optimierung der Bahn müssen daher sowohl der gesamte Antriebsstrang als auch die Mechanik betrachtet werden. Hierzu werden sämtliche Komponenten modelliert und die energieoptimale Bahn mittels nichtlinearer Optimierungsverfahren ermittelt.Jahr: 2015Förderung: Industrie
![]()
![]()
-
Automatische PID-Reglereinstellung für serielle RoboterKlassische PID Regler sind aufgrund ihrer Einfachheit und Robustheit eine der am meisten verwendeten Regelstrukturen in industriellen Prozessen. Auch in dem Gebiet der Robotik ist die Verwendung von PID Reglern wegen ihrer Vorteile weit verbreitet. Roboter sind jedoch hochgradig nichtlineare und hochgekoppelte MIMO-Systeme. Daher gilt die Einstellung der Regelparameter für solche Systeme als hochkomplexe Aufgabe, die in der Regel durch traditionelle oder manuelle Methoden (z.B. durch gezieltes Ausprobieren) durchgeführt wird.Team:Jahr: 2017
![]()
![]()
-
Regelung zur Effizienzsteigerung von industriellen GleichstromnetzenZiel dieses Projekts ist die Entwicklung einer intelligenten Ansteuerung der Systeme innerhalb eines Gleichstromzwischenkreis- verbunds, sodass die netzseitig aufgenommene Energie reduziert wird. Die Energiesteuerung soll im nächsten Schritt auf Energiespeicher und variable erneuerbare Energien ausgedehnt werden. Schwerpunkte sind vor allem Simulationstiefe, Große der Einflussnahme, Energiespeichersteuerung und Aufbau einer Intelligenten Steuerung, welche aktiv in den Prozess eingreift.Team:Jahr: 2017Förderung: Bosch Rexroth AG.
![]()
![]()
-
Generierung aufgabenspezifischer Roboterkinematiken durch kombinierte Struktur- und MaßsyntheseUm den Automatisierungsprozess, insbesondere von klein- und mittelständischen Unternehmen, weiter voranzutreiben, wird im Umfang dieses Forschungsprojektes eine neue Methodik zur aufgabenspezifischen Entwicklung seriellkinematischer und parallelkinematischer Roboter erarbeitet. Ziel ist eine ganzheitliche und automatisierte Synthetisierung von Roboterstrukturen in Abhängigkeit eines benutzerdefinierten Anforderungsprofils.Team:Jahr: 2018Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 2018 - 2022
-
Implementierung robotergestützter Orientierungssysteme auf dem Campus MaschinenbauDer Campus Maschinenbau war die größte Neubaumaßnahme der Universität und hat im Jahr 2020 seinen endgültigen Betrieb aufgenommen. Um die Orientierung auf dem Campus zu erleichtern und Anfragen verschiedener Art zu beantworten, soll in diesem Projekt ein robotergestütztes Orientierungssystem konzipiert und implementiert werden. Ein Roboter soll sowohl Auskunft über das Informations- und Raumbelegungssystem geben, als auch als Wegbegleiter für Personen zur Erstorientierung fungieren.Team:Jahr: 2018Förderung: Fakultät für MaschinenbauLaufzeit: 03/2018 - 02/2023
![]()
![]()
-
Parallel-kontinuierliche Manipulatoren – Egalisierung strukturindividueller Nachteile durch Kombination von Parallel- und KontinuumsroboternIm Rahmen dieses Projekts wird die kinematische Struktur von parallelen Robotern mit kontinuierlichen kinematischen Ketten erforscht. Das Ziel ist die hohe Genauigkeit und Steifigkeit von parallelen Robotern mit der hohen Dexterität und Manipulierbarkeit von kontinuierlichen Robotern zu vereinen.Team:Jahr: 2018Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 1.1.2018-31.12.2019
![]()
![]()
-
Soft Material Robotics Toolbox (SMaRT) – Methodologie zum Entwurf und der Entwicklung weicher RoboterstrukturenRoboter, die sich aufgrund ihrer hautähnlichen Nachgiebigkeit der Umwelt anpassen können, und aus silikonartigen Materialien gefertigt werden, bringen viele Vorteile, aber auch Herausforderungen mit sich. Es wird erforscht, wie sich ein methodisches Vorgehen beim Entwurf und der Entwicklung dieser Systeme umsetzen lässt. Dazu erfolgt die Modellierung der Dynamik auf Basis von Strukturmodellen und die Realisierung von Versuchsständen zur Identifikation bzw. Validierung erzeugter Modelle. Die kontrollierte Bewegung pneumatisch aktuierter Systeme stellt eine zentrale Herausforderung in dieser Forschungsarbeit dar. Es werden dazu modellbasierte Regelungsstrategien entwickelt, untersucht und verglichen. Das Projekt ist Teil des Schwerpunktprogramms 2100 (https://www.spp2100.de/).Team:Jahr: 2019Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 06/2019 - 01/2025
![]()
![]()
-
Haley - Hydraulischer schlangenartiger Roboter für die EndoskopieEndoskopische Verfahren für Diagnostik und Therapie verändern die Medizin nachhaltig. Für einen erfolgreichen Eingriff müssen zwei wichtige Faktoren erfüllt sein: Um schwer zugängliche Gebiete erreichen zu können, ist eine gute Manövrierbarkeit nötig. Zusätzlich erfordert der Eingriff im Zielbereich eine hohe Struktursteifigkeit, um Manipulationskräfte aufnehmen zu können und dem Arzt eine feste Arbeitsplattform zur Verfügung zu stellen. Heutige Endoskope können jedoch nicht beide Anforderungen gleichzeitig erfüllen. Es werden entweder rein starre oder rein flexible Endoskope verwendet, äußerst selten sind – selbst in der Forschung – versteifbare Mechanismen anzutreffen. Als Brückenschlag zwischen flexiblen und starren Robotern soll daher ein hydraulisch aktuiertes, schlangenartiges Endoskop in dem HALEy Projekt erforscht werden.Team:Jahr: 2020Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 10/2020-04/2023
![]()
![]()
-
Roboterassistierte BoroskopieUm eine teure Demontage von Triebwerken in der Luftfahrttechnik zu vermeiden, werden zur Begutachtung der Schaufeln im Inneren einer Turbine Boroskope eingesetzt. Das Ziel dieses Forschungsprojekts besteht in der Entwicklung eines neuartigen Kontinuumsroboters, der mittels eines Streifenprojektionssystems am Endeffektor die Untersuchung der Turbinenschaufeln ermöglicht und die bisher verwendeten starren Boroskope ersetzt.Team:Jahr: 2020Förderung: Bundesministerium für Wirtschaft (BMWi)Laufzeit: 03/2020 - 12/2021
![]()
![]()
-
Mensch-Roboter-Kollaboration mit parallelkinematischen Maschinen (MRK-PKM)Im Rahmen des DFG-geförderten Projektes wird erforscht, wie eine sichere Mensch-Roboter-Kollaboration mit parallelkinematischen Maschinen durchgeführt werden kann. Hauptaspekt des Forschungsprojektes ist die Erkennung von Kollisionen und Klemmungen zwischen dem Menschen und der Roboterstruktur, sowie eine entsprechende Reaktion darauf. Zur technischen Umsetzung von Reaktionen auf Klemmung und Kollision werden Beobachter eingesetzt, die verfügbare Messsignale wie Motorstrom und Gelenkwinkel in geeigneter Form filtern und fusionieren. Zusätzlich wird das dynamische Verhalten des Roboters mit dem Menschen geregelt, um im Klemm- und Kollisionsfall die Kräfte von vornherein zu reduzieren. Die erforschten Methoden und Verfahren werden an realen parallelkinematischen Maschinen implementiert und validiert.Team:Jahr: 2021Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 03/2021-09/2023
![]()
![]()
-
Entwicklung eines automatischen Systems zur präzisen, mechanischen Unkrautbekämpfung im Bio-Gemüsebau (AMUN)Durch Verunkrautung entstehen im Bio-Gemüse-Anbau regelmäßig teils erhebliche Ernteeinbußen. Ein zielführender Anbau erfordert oft hohen Personaleinsatz, um die Unkräuter nahe der Nutzpflanzen in Handarbeit zu jäten. Je nach Kulturpflanze resultieren zum Teil deutliche Mehrkosten gegenüber Produkten aus der konventionellen Landwirtschaft, in der oft umstrittene Herbizide eingesetzt werden. In diesem Projekt wird ein mobiles System entwickelt, das Unkrautpflanzen auf dem Feld kamerabasiert identifiziert, lokalisiert und gezielt vernichtet. Kernaspekte der Projektaufgaben am imes stellen die Synthese einer auf die Aufgabe angepassten Roboterkinematik zur Werkzeugführung, sowie die Entwicklung leistungsfähiger Algorithmen zur echtzeitfähigen Bahnplanung unter anspruchsvollen Umgebungsbedingungen dar. Zudem werden in diesen Bereichen verschiedenste Entwicklungen und Forschungstätigkeiten angestrebt, um die Bearbeitungsgüte und -geschwindigkeit zu maximieren und somit eine wirtschaftliche Alternative zu realisieren.Team:Jahr: 2021Förderung: Bundesministerium für Ernährung und Landwirtschaft (BMEL)Laufzeit: 07/2021-07/2024
-
roboterfabrikUm Hannover als einen führenden Robotik-Standort zu etablieren, wurde an der Leibniz Universität in Kooperation mit der Region Hannover und dem Roberta Regiozentrum Hannover das Gemeinschaftsprojekt roboterfabrik ins Leben gerufen. Die Roboterfabrik verfolgt einen kontinuierlichen Ansatz zur Ausbildung sogenannter Robotic Natives, der in der Schule beginnt und an der Universität fortgesetzt wird. Bildungsangebote im Bereich der Robotik zur Berufsorientierung und für Unternehmensmitarbeiter werden ebenfalls angeboten.Team:Jahr: 2023Förderung: Region HannoverLaufzeit: 01/2023-12/2025
![]()
![]()







































Identifikation & Regelung
-
Zeitoptimale Regelung elektromechanischer AktorenZur gezielten Abgasrückführung werden unterschiedliche elektromechanische Stellglieder eingesetzt, welche mit hoher Dynamik den Abgasanteil im Verbrennungsraum regeln. Innerhalb dieses Forschungsprojektes sollen modellbasierte Reglerstrukturen implementiert werden, die das Potential der begrenzten Stellgröße ausnutzen.Förderung: IAV GmbH GifhornLaufzeit: 11/2012-10/2013
![]()
![]()
-
Semi-Aktives MotorlagerAm Mechatronik Zentrum Hannover wurde ein semi-aktives Motorlager entwickelt, welches auf dem Reluktanzkraftprinzip basiert und die Anpresskraft auf sog. Reibbeläge variieren kann.Team:Jahr: 2005Förderung: Industrie
![]()
![]()
-
Online-ReibwertprognoseIm Rahmen dieses Projektes soll in Zusammenarbeit mit einer Fahrzeugzulieferer-Firma die Machbarkeit der Reibwertprognose im KFZ auf Basis eines Multisensorkonzepts geprüft und umgesetzt werden. Die Schwerpunkte der Arbeit liegen in der Fahrzeugtechnik, Messtechnik und Digitalsignalverarbeitung.Team:Jahr: 2005Förderung: Industrie
![]()
![]()
-
Autonome Messeinrichtung zur Untersuchung des Reibprozesses am GroschradDie Untersuchung des Reibprozesses zwischen Fahrbahn und Reifen wird durch die Komplexität des Reifens und die Wechselwirkungen mit Fahrwerk und Antriebsstrang erschwert. Um dieses Problem zu lösen, wurde am MZH in Zusammenarbeit mit dem IFM das Reibmobil, ein elektrisch angetriebenes Fahrzeug gebaut.Team:Jahr: 2008Förderung: Deutsche Forschungsgemeinschaft
![]()
![]()
-
Modellbasierte Analyse elektrischer AntriebssystemeIn diesem Projekt werden Modelle entwickelt, um das Verhalten elektrischer Antriebsstränge, i. Allg. bestehend aus einem Umrichter, Drehstrommotor, mechanischer Koppelelemente und abtriebsseitiger Lastmaschine zu beschreiben. Desweiteren werden diese Modelle genutzt, um Optimierungspotentiale zu untersuchen und umzusetzen.Team:Jahr: 2010Förderung: Lenze Automation GmbH
![]()
![]()
-
MagnetstanzeDas Ziel im DFG-Verbundprojekt "Scherschneiden dünner Bleche mittels adaptiver Magnetaktorik" in Zusammenarbeit mit dem Institut für Umformtechnik und Umformmaschinen ist der Aufbau und die Regelung einer elektromagnetisch aktuierten Stanze. Mit Hilfe von Hochleistungselektromagneten ist die Stößelkinematik frei einstellbar. Demzufolge können der Weg-Zeit-Verlauf des Stößels an den Schneidprozess angepasst und die durch den Schneidprozess hervorgerufene Schwingungen kompensiert werden. Derzeitig sind Schneidfrequenzen von bis zu 50 Hz erreichbar.Team:Jahr: 2010Förderung: Deutsche Forschungsgemeinschaft (DFG)
![]()
![]()
-
Analyse und Kompensation von FahrzeugschwingungenEin aktuelles Projekt am imes stellt die Analyse von Fahrzeugschwingungen im PKW dar. Das Forschungsvorhaben zielt darauf hin einzelne Phänomene zu analysieren und deren Erreger im PKW aufzuspüren, damit geeignete Maßnahmen - Regelungsstrategien - zur Reduzierung bzw. Vermeidung eingeleitet werden können.Team:Jahr: 2010Förderung: IAV GmbH
![]()
![]()
-
Aktive Beeinflussung des Werkzeugsverschleißes beim AußenrundeinstechschleifenRatterschwingungen stellen im Schleifprozess eine Leistungsbegrenzung bei der Fertigung von präzisen Bauteilen dar. Zur Verhinderung von Werkzeugverschleiß bedingten Regenerativ Effekten sind bisher häufige Abrichtzyklen notwendig, welche den Fertigungsprozess verlangsamen. Der Ansatz dieses DFG-Projekts in Zusammenarbeit mit dem Institut für Fertigungstechnik und Werkzeugmaschinen ist eine aktive Dämpfung der Ratterschwingungen durch das Einbringen zusätzlicher Kräfte in den Prozess durch eine aktive Lünette mit elektromagnetischen Aktoren.Team:Jahr: 2011Förderung: Deutsche Forschungsgemeinschaft (DFG)
![]()
![]()
-
Online-Identifikation regelungstechnisch relevanter Systemparameter elektrisch angetriebener mechanischer SystemeDas primäre Ziel dieses Forschungsvorhabens liegt in der Bestimmung der wesentlichen Parameter eines elektrischen Antriebssystems mit gekoppelter Mechanik, ohne Nutzung spezieller Testtrajektorien und ohne zusätzliche Sensorik sondern durch Beobachtung der Parameteridentifizierbarkeit in Abhängigkeit der Streckeneigenschaften im laufenden Betrieb. Grundlage bildet ein echtzeitfähiges Modell des mechatronischen Gesamtsystems.Team:Jahr: 2011Förderung: Forschungsvereinigung Antriebstechnik (FVA)
![]()
![]()
-
Robuste Schwimmwinkelschätzung, basierend auf sensitivitätsbasierter Parameteradaption und nichtlinearen BeobachterstrukturenEin aktuelles Projekt am Institut für Mechatronische Systeme befasst sich mit der Schätzung relevanter Systemzustände und Parameter der Fahrzeugquerdynamik. Hierzu werden verschiedene modellbasierte Beobachterstrukturen, basierend auf sensitivitätsbasierter Parameteradaption realisiert, um eine robuste Schätzung zu garantieren.Team:Jahr: 2013
![]()
![]()
-
Führungslose, miniaturisierte Maschine zur Herstellung kleiner Stanzteile unter Einsatz einer ResonatzantriebseinheitIn Zusammenarbeit mit dem Institut für Umformtechnik (IFUM) wird eine Stanzeinheit zum Schneiden dünner Bleche entwickelt. Durch Einsatz von Magnetaktoren und gezielter Anregung der Resonanz des Feder-Masse-Systems soll eine möglichst kleine, energiesparende Stanze entstehen.Team:Jahr: 2014Förderung: Deutsche Forschungsgemeinschaft (DFG)
![]()
![]()
-
Analyse von AntriebstrangschwingungenEin aktuelles Projekt am imes stellt die Analyse von Fahrzeugschwingungen im Antriebsstrang des PKW dar. Das Forschungsvorhaben zielt darauf hin, einzelne Phänomene zu analysieren und deren Auslöser im PKW zu identifizieren, damit geeignete Maßnahmen zur Reduzierung bzw. Vermeidung eingeleitet werden können. Diese Arbeit wird im Rahmen eines Industrieprojektes mit der Firma IAV GmbH bearbeitet.Team:Jahr: 2015Förderung: IAV GmbH
![]()
![]()
-
iTracC - Intelligent Traction ControlDas Projekt iTracC hat das Ziel die Fahrsicherheit in Fahrzeugen mit elektrifiziertem Antriebsstrang durch eine optimierte Antriebs-Schlupf-Regelung basierend auf adaptiven Antriebsstrang- und Reibmodellen zu erhöhenTeam:Jahr: 2015Förderung: Bundesministerium für Wirtschaft und Energie (BMWi)
![]()
![]()
-
Automatisierte Inbetriebnahme und Condition Monitoring industriell eingesetzter RegalbediengeräteDas Ziel des Kooperationsprojekts ist die automatisierte Inbetriebnahme von Regalbediengeräten und modellbasiertem Condition Monitoring im laufenden Betrieb sowie Schwingungskompensation.Team:Jahr: 2015Förderung: ZIM-KOOPLaufzeit: 2 Jahre
![]()
![]()
-
Remote Mechatronics ChallengeRemote Laboratories erlauben die Steuerung und Beobachtung eines realen Versuchsstandes über das Internet. Dadurch können Vorlesungsinhalte vertieft und auf reale Versuchsstände angewendet werden. Neben der dauernden Verfügbarkeit ist die Vorgabe definierter physikalischer Grenzen des Systems ein großer Vorteil gegenüber klassischen Laborkonzepten.Team:Jahr: 2016Förderung: HSP
![]()
![]()
-
Online-Identifikation und Beobachtung von Systemparametern elektrischer Antriebssysteme zur Nachführung von regelungstechnisch relevanten Parametern IIDas primäre Ziel dieses Forschungsvorhabens liegt in der Bestimmung der wesentlichen Parameter eines elektrischen Antriebssystems mit gekoppelter Mechanik ohne zusätzliche Sensorik. Dies erfolgt zum Einen durch optimierte Identifikationstrajektorien und zum Anderen im laufenden Betrieb durch Beobachtung der Parameteridentifizierbarkeit in Abhängigkeit der Streckeneigenschaften. Grundlage bildet ein echtzeitfähiges Modell des mechatronischen Gesamtsystems.Leitung: Prof. Dr.-Ing. Tobias OrtmaierTeam:Jahr: 2017Förderung: Arbeitsgemeinschaft industrieller Forschungsvereinigungen „Otto von Guericke“ e.V. (AiF)Laufzeit: 07/2017-01/2020
![]()
![]()
-
simTrailer - Vollständige, modellbasierte Trailer-ZustandsüberwachungIm Rahmen des Projekts simTrailer werden online-fähige Methoden zur modellbasierten Zustandsüberwachung des Trailers erarbeitet, um einen möglichst effizienten Einsatz von Sensorik zu gewährleisten.Team:Jahr: 2017Förderung: BPW Bergische Achsen KG
![]()
![]()
-
RoCCl - Road Condition CloudIm Rahmen des DFG-geförderten Projektes RoCCl wird in Kooperation mit dem Institut für Fahrzeugtechnik der TU Braunschweig eine zeitlich veränderliche Karte, die Road Condition Cloud, entwickelt. Dabei wird der Fahrbahnzustand, mit zusätzlicher Konfidenz, durch wahrscheinlichkeitsbasierte Datenfusion verschiedener heterogener Informationen aus Onboard- und Umgebungssensorik geschätzt und in die Karte überführt. Die Kommunikation mit der RoCCl bietet somit die Möglichkeit Fahrerassistenzsysteme zu jedem Zeitpunkt bezüglich des aktuellen Fahrbahnzustandes korrekt zu initialisieren.Team:Jahr: 2018Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 02/2018 - 01/2021
![]()
![]()
-
Prozessmonitoring in der Produktionstechnik (ProMoPro)Im Rahmen dieses EFRE-geförderten Projektes werden universelle Werkzeuge und Methoden zur Digitalisierung von Produktionsanlagen energieintensiver Industriezweige geschaffen. Die umfassende Akquise heterogener Anlagen- und Prozessdaten ermöglicht das Partitionieren des Gesamtprozesses in geeignete Teilprozessen, deren Beschreibung durch aussagekräftige Merkmale und das Anlernen mathematischer Modelle, um die Auswirkungen der Teilprozesse auf verschiedene Zielgrößen (z.B. Produktqualität und Energieverbrauch) zu beschreiben.Team:Jahr: 2018Förderung: EFRE (Europäischer Fonds für regionale Entwicklung)Laufzeit: 3 Jahre
![]()
![]()
-
Condition Monitoring nichtlinearer Anlagen in der AutomatisierungstechnikDie fortschreitende Vernetzung von industriellen Anlagen liefert eine zunehmende Datenmenge, die im Betrieb zur Verfügung stehen. Für den Menschen ist es meist nicht mehr möglich diese Informationsmenge zu überschauen und Erkenntnisse daraus zu ziehen. Mit der Entwicklung immer leistungsfähigerer Prozessoren, sind für diesen Einsatz Verfahren des maschinellen Lernens in den Fokus gerückt. In diesem Projekt sollen die vorhandenen Verfahren, die zumeist auf physikalischen Modellen basieren, ergänzt werden, um so eine umfassende Überwachung ermöglichen. Der Fokus liegt dabei auf nichtlinearen Systemen, die nur schwer durch physikalische Modelle beschrieben werden können.Team:Jahr: 2019Förderung: Lenze SELaufzeit: 10/2018 - 09/2022
![]()
![]()
-
Energieoptimale TrajektorienplanungIm Zuge voranschreitender Automatisierung des Straßenverkehrs ist zu erwarten, dass Fahrstrecken künftig vermehrt mit Unterstützung von Fahrerassistenzsystemen zurückgelegt werden. Vor diesem Hintergrund gewinnt die Energieeffizienzsteigerung einer teilautomatisierten Fahrzeugführung zunehmend an Bedeutung. Dieses Forschungsprojekt zielt darauf ab, die teilautomatisierte Fahrzeuglängsführung durch die Planung und Optimierung einer Geschwindigkeitstrajektorie energieeffizienter zu gestalten. Dabei gilt es individuelle Fahrzeugführungspräferenzen im Zielkonflikt einer kurzen Fahrtdauer und einem niedrigen Energiebedarf zu berücksichtigen. Zur Geschwindigkeitsoptimierung werden, neben spezifischen Fahrzeugeigenschaften, prädiktive Streckeninformationen (z.B. Höhentopologie, Geschwindigkeitsbegrenzungen und Kurvenradien) für den bevorstehenden Routenabschnitt (Longrange) herangezogen. Darüber hinaus soll dynamisch bei unvorhersehbaren Ereignissen (wie z.B. vorrausfahrende Fahrzeuge oder nicht-kartierte Geschwindigkeitsbegrenzungen) auf kurzem Prädiktionshorizont (Shortrange) reagiert werden. Ziel ist die Entwicklung eines echtzeitfähigen modellprädiktiven Regelungsverfahren, mit dem die Fahrzeuglängsführung fahrerindividuell energetisch optimal erfolgt.Team:Jahr: 2019Förderung: IAV GmbHLaufzeit: 12/2019 - 11/2022
![]()
![]()
-
Automatisierte Inbetriebnahme elektrischer Antriebsstränge - Nutzungsanalyse von temporärer Inbetriebnahme-SensorikUm detaillierte Modelle für die automatisierte Auslegung von Regelung und Vorsteuerung zu gewinnen, lässt sich Vorwissen mit einer Struktur- und Parameteridentifikation auf verschiedene Arten kombinieren. Derzeit ist es schon möglich, Modelle für elektrische Antriebstränge experimentell zu identifizieren und diese zur Reglerauslegung, Kalmanfilterung, online Zustands- und Parameterschätzung, usw. zu nutzen. Es bleibt das Problem, dass die Eindeutigkeit der Strukturidentifikation nicht immer gegeben ist. Als mögliche Lösung hierfür kämen temporäre Inbetriebnahme-Sensoren in Frage, wie lastseitige Positionsgeber, Beschleunigungssensoren, DMS, Drehratensensoren u.Ä. Es wurde bisher jedoch wenig untersucht, wie Art, Qualität und Position der temporären Sensoren zur Lösung des Mehrdeutigkeitsproblems und zur Verbesserung der Genauigkeit der Modelle beitragen. Die Forschungsziele sind 1.) Höhere Qualität und Robustheit der Verfahren aus den Vorgängerverfahren durch temporäre Inbetriebnahme-Sensorik 2.) Reduktion von Inbetriebnahmezeit durch Identifikation der mechanischen Strecke 3.) Inbetriebnahmebox (Low-Cost-Hardware, bzw. Smartphone-App) 4.) Breites Anwendungsfeld durch automatische Auswahl der Struktur 5.) Bewertung des Nutzens von temporärer Inbetriebnahme-Sensorik Die temporäre Sensorik kann nach der Inbetriebnahme an anderen Aufbauten weiterverwendet werden, bzw. ist preislich erschwinglich, da auf Low-Cost-Hardware gesetzt wird. Die erarbeiteten Methoden sollen an verschiedenen Prüfständen validiert und in die e-Workbench (FVA 827) integriert werden.Leitung: Prof. Dr.-Ing. Tobias OrtmaierTeam:Jahr: 2020Förderung: Forschungsvereinigung Antriebstechnik (FVA)Laufzeit: 02/2020-02/2021
![]()
![]()
-
Identifikation dynamik- und sicherheitsrelevanter Trailerzustände für automatisiert fahrende Lastkraftwagen (IdenT)Vor allem im Bereich der Nutzfahrzeuge ist das wirtschaftliche Potential von automatisiert fahrenden Lastkraftwagen besonders hoch. Damit dieses Vorhaben gelingen kann, muss der LKW-Anhänger (sog. Trailer) deutlich intelligenter werden, als er heute ist. Während das Zugfahrzeug serienmäßig mit viel Sensorik ausgestattet ist, gibt es im Trailer noch deutlichen Nachholbedarf. Im Rahmen dieses Projekts soll mit mehreren Projektpartnern aus Forschung und Industrie erarbeitet werden, wie durch Einsatz von zusätzlicher Sensorik im Trailer die fahrdynamischen und sicherheitsrelevanten Zustände berechnet bzw. geschätzt werden können. Ein weiterer Aspekt des Projekts ist die Beurteilung von verschleißbehafteten oder geschädigten Komponenten im Trailer. Dazu wird ein Online-Zwilling erstellt, der während der Fahrt auf einer Recheneinheit im Trailer fahrdynamische Zustände schätzt. Weiterhin sollen Informationen über die Fahrbahnbeschaffenheit gesammelt und mit Kameras der Rückraum überwacht werden. Die online gesammelten Informationen werden über eine Cloud-Infrastruktur an einen Offline-Zwilling gesendet, der dann mit Hilfe von detaillierten Fahrzeug-Modellen den Komponentenverschleiß berechnet und an den Online-Zwilling zurück sendet. Das imes wird sich im Rahmen dieses Projekts hauptsächlich mit der Entwicklung des Online-Zwillings erfassen und setzt für die Online-Informationsgenerierung Methoden der fahrdynamischen Modellierung, des maschinellen Lernens und der Informationsfusion ein.Team:Jahr: 2020Förderung: Bundesministerium für Wirtschaft und Klimaschutz (BMWK)Laufzeit: 02/2020-01/2023
![]()
![]()
-
Cloud-Anwendung für zeitlich veränderliche Fahrbahnzustandsinformationen (InFusion)Mit der fortschreitenden Automatisierung von Fahrzeugen wächst die Bedeutung, Kenntnisse und Fähigkeiten zu kompensieren, die durch den Wegfall des Fahrers als Steuerungselement relevant für den Betrieb des Fahrzeuges und die Verkehrssicherheit sind. Hierfür sind Informationen zum witterungsbedingten Fahrbahnzustand von essentiellem Stellenwert. Während die Mehrzahl der Teilnehmer am öffentlichen Straßenverkehr PKW Nutzer darstellen, sind im Nutzfahrzeugsektor zwar weniger Fahrzeuge unterwegs, dafür aber auf deutlich längeren Strecken und festen Routen. Gleichzeitig geht mit dem Wandel zu intelligenten, autonomen Fahrzeugen und zum vernetzten Verkehr ein Zuwachs an Daten in jedem Fahrzeug sowie in der Fahrzeugumgebung einher. Die so erhobenen Daten lassen sich jedoch nicht ohne weiteres zwischen Fahrzeugen unterschiedlicher Klassen austauschen. Ziel des Projekts ist die Untersuchung und Entwicklung verschiedener Verfahren zur Ermittlung unterschiedlichster Aspekte des Fahrbahnzustandes. Eine geeignete Zusammenführung und Normierung der Daten soll den Austausch nicht nur zwischen ähnlichen Fahrzeugen, sondern auch über Fahrzeugklassen hinaus ermöglichen. Durch einen cloudbasierten Austausch und die Zusammenführung der Vielzahl an internen und externen Daten ergibt sich so eine vielversprechende Möglichkeit für eine sichere Schätzung des Fahrbahnzustandes.Team:Jahr: 2020Förderung: Bundesministerium für Verkehr und digitale Infrastruktur (BMVI)Laufzeit: 06/2019-06/2023
![]()
![]()
-
Hybride ReibwertschätzungFür die Optimierung bestehender und Entwicklung weiterer Fahrerassistenzsysteme bietet die frühzeitige Kenntnis des Reifen-Fahrbahn-Kontakts ein erhebliches Potential. Auf der einen Seite können bestehende Systeme wie das Antiblockiersystem (ABS) oder das elektronische Stabilitätsprogramm (ESP) optimiert werden. Auf der anderen Seite kann z. B. für das autonome Fahren eine zu fahrende Trajektorie geplant und an die Fahrbahnoberfläche adaptiert werden. Im Rahmen des Projekts "Hybride Reibwertschätzung" soll anhand bestehender Sensoren im Fahrzeug der maximale Reibwert des Reifen-Fahrbahn-Kontakts geschätzt werden. Dies erfolgt in bisherigen Forschungsprojekten primär über modellbasierte Verfahren basierend auf einem physikalischen Fahrzeugmodell. Aufgrund des begrenzten Detaillierungsgrads der Modellierung und der damit einhergehenden begrenzten Genauigkeit der Schätzung, wird im Rahmen des Projekts an datenbasierten Schätzern, sowie der Kombination beider zu hybriden Ansätzen geforscht. Ziel des Projekts ist die Entwicklung eines hybriden Reibwertschätzers, welcher die Vorteile der modell- und datenbasierten Ansätze kombiniert.Team:Jahr: 2020Förderung: Dr. Jürgen und Irmgard Ulderup StiftungLaufzeit: 03/2020 - 03/2023
![]()
![]()
-
SyMoLearn - Physikalische Modellierung & Maschinelles Lernen: Symbiose zur Optimierung mechatronischer SystemeModellbasierte Verfahren haben in den vergangenen Jahrzehnten innerhalb der Ingenieurswissenschaften und somit auch der Mechatronik zu einer weitreichenden Gütesteigerung dynamischerSysteme geführt. Die häufig verwendete pysikalische Modellbildung erhöht das Systemverständnis und ermöglicht damit eine Verbesserung der Beobachter- und Regelungsstrukturen. Die Genauigkeit der Modellierung ist dabei prinzipbedingt auf den Detailgrad der physikalischen Modelle beschränkt. Eine Genauigkeitssteigerung würde nur mit erhöhtem Detailgrad und somit höherem Rechenaufwand möglich sein. Einen alternativen Ansatz zur physikalischen Modellierung bieten Verfahren des Maschinellen Lernens. Diese Verfahren können gleichermaßen für die Modellierung, darüber hinaus aber auch direkt für Beobachtung und Regelung dynamischer Systeme eingesetzt werden. Dabei bieten sie das Potential den maximalen Informationsgehalt der erfügbaren Daten des jeweiligen Systems auszunutzen und somit eine Genauigkeitssteigerung zu erreichen. Demnach ermöglichen sie in diesen Bereichen eine sprunghafte Verbesserung der Güte. Maßgebliche Nachteile bestehen jedoch in dem Verlust der physikalischen Interpretierbarkeit der Modelle sowie der zumeist Notwendigkeit großer Mengen an Daten. Um die beschriebenen Vorteile zusammenzuführen und die Nachteile zu beseitigen, bietet sich eine Symbiose beider Verfahren an. Dabei wird eine hybride Verwendung ausgenutzt, um beispielsweise eine verbesserte Genauigkeit unter Beibehaltung der physikalischen Interpretierbarkeit zu ermöglichen. Der Anteil des jeweiligen Verfahrens ist variabel und abhängig von der betrachteten Zielgröße und Anwendung zu wählen. Das Ziel ist somit eine Optimierung mechatronischer Systeme durch die Hinzunahme von Verfahren des Maschinellen Lernens. Die erarbeiteten Verfahren werden an zwei verschiedenen Prüfständen entwickelt und analysiert. Dabei wird zum einen ein grundlegendes Systeme, anhand eines inversen Doppelpendels betrachtet. Zum anderen dient ein elektrisch angetriebenes Serienfahrzeug als anwendungsnaher Versuchsträger. Je nach Prüfstand werden unterschiedliche Zielgrößen adressiert und die entsprechende Kombination der Verfahren optimiert. Schließlich werden die Methoden auf die Echtzeitsysteme der Prüfstände übertragen. Abschließend werden die erarbeiteten Herangehensweisen mit bestehenden Verfahren verglichen und die verbesserte Güte aufgezeigt.Team:Jahr: 2020Förderung: Leibniz Young Investigator GrantLaufzeit: 2 Jahre
![]()
![]()
-
Automatisierte Reglerauslegung auf Basis (teil-)automatisch generierter, regelungstechnisch optimaler ModelleDie modellbasierte Reglerauslegung ermöglicht eine objektive, reproduzierbare Reglereinstellung und sofern gewünscht auch eine online-Parameteranpassung. Die Reglereinstellung erfolgt nach einfachen Rechenvorschriften oder anhand von Simulationen ohne kostspielige Versuche. Die Schwierigkeit ist jedoch, für ein gegebenes System das passende Modell festzulegen. Häufig ist bei der Modellierung nicht klar, welche physikalischen Effekte im Modell und damit in dem modellbasierten Regler berücksichtigt werden müssen, bzw. vernachlässigt werden können, z.B. Elastizitäten, Reibung, Totzeit, Lose. Auch die Entscheidung über ein geeignetes Regelungskonzept (z.B. phasenabsenkendes Netz vs. Kerbfilter, ...) erfordert viel Expertenwissen. In diesem Projekt sollen (teil-)automatisiert Modelle gewählt und modellbasierte Regler ausgelegt werden. Kriterien wie z.B. maximale Dynamik und Minimierung der Überschwingweite führen zu verschiedenen Parametrierungen. Auf Basis dieser und weiterer vom Anwender vorgebbarer applikationsabhängiger Kriterien soll ein Gesamtkonzept für Modell und Regler generiert werden. Dadurch ist eine deutlich verkürzte Inbetriebnahmezeit bei vergleichbar guten Reglereigenschaften zu erwarten. Die Bewertung der Modelle für die Modellauswahl muss basierend auf regelungstechnischen Kriterien durchgeführt werden. Dies steht im Gegensatz zu häufig verwendeten Methoden wie Kreuzvalidierung und Informationskritieren. Mögliche Ansätze ergeben sich aus dem Bereich der modellprädiktiven Regelung.Leitung: Dr.-Ing. Hans-Georg JacobTeam:Jahr: 2021Förderung: Forschungsvereinigung Antriebstechnik (FVA)Laufzeit: 03/2021-02/2022
![]()
![]()
-
Collaborative Remote LaboratoryNicht nur vor dem Hintergrund der Covid19-Pandemie ist die Digitalisierung der Lehre ein zentrales Element für das erfolgreiche und zukunftsfähige Studieren. Remote Laboratories erlauben hierbei die Steuerung und Beobachtung eines realen Versuchsstandes über das Internet. Dadurch können Vorlesungsinhalte vertieft und auf reale Versuchsstände angewendet werden. Neben der dauernden Verfügbarkeit ist die Vorgabe definierter physikalischer Grenzen des Systems ein großer Vorteil gegenüber klassischen Laborkonzepten. Im Rahmen dieses Projektes wird ein Remote Laboratory mit mehreren Laborversuchen für einen kollaborativen Roboter entwickelt.Jahr: 2021Förderung: HSPLaufzeit: 1 Jahr
![]()
![]()
-
RekuTrAxZiel des Projektes RekuTrAx ist die Entwicklung einer hochintegrierten Rekuperationsachse für LKW-Trailer. Rekuperation, die Rückgewinnung von elektrischer Energie bei einem Bremsvorgang, ist eine Technik, die für die Reduktion des Energieverbrauchs von Fahrzeugen genutzt wird. Der elektrische (Hilfs-)Antriebsstrang erlaubt direkt eine Rekuperation, ohne dass zusätzliche Hilfsmittel genutzt werden. Anders sieht es bei Fahrzeugen aus, die mit fossilen Brennstoffen oder Brennstoffzellen betrieben werden. Hier ist eine Rekuperation direkt über den Antriebstrang nicht möglich. Dieser Ansatz hat bei LKW-Trailern aufgrund der hohen kinetischen Energie besonders hohes Potenzial, Ziel ist es daher, die Rekuperationsachse eines LKW-Trailer unabhängig von der Zugmaschine nutzbar zu entwickeln. Das Projekt wird in Zusammenarbeit mit dem KIT sowie den Unternehmen REFU Drive GmbH und BPW Bergische Achsen KG bearbeitet. Die Schwerpunkte des imes liegen bei der Entwicklung eines intelligenten Energiemanagements sowie dem Condition Monitoring.Team:Jahr: 2022Förderung: BMWKLaufzeit: 08/22 - 07/25
![]()
![]()



















































Medizintechnik & Bildverarbeitung
-
Mini-Projektor basierte Augmented Reality für medizinische AnwendungenZum Zwecke einer Optimierung der Darstellungsweise von Informationen sind Augmented-Reality-Ansätze Gegenstand aktueller Forschungen. Im Bereich der Medizintechnik ist das Ziel dabei die Visualisierung von präoperativen, medizinischen Planungsdaten unmittelbar im Blickfeld des Chirurgen. Dieser Ansatz basiert auf einer simultanen Darstellung der Realität, in diesem Fall also des Patienten, und zusätzlicher visueller Informationen. Unter Verwendung eines Mini-Projektors (konventioneller Beamer der Größe eines Mobiltelefons) und eines optischen Navigationssystems wurde ein handgeführtes Projektionssystem aufgebaut, das die lagerichtige Darstellung anatomischer Strukturen sowie Navigationsanweisungen in Echtzeit unmittelbar auf der Oberfläche des Patienten ermöglicht.Team:Jahr: 2010
![]()
![]()
-
Einsatz der OCT-Bildgebung zur medizinischen NavigationAuf dem Gebiet der Chirurgie entstehen immer höhere Anforderungen an die Präzision und Minimalinvasivität eines durchgeführten Eingriffes. In enger Kooperation mit dem Institut für Mess- und Regelungstechnik und der HNO-Klinik der MHH soll ein medizinisches Assistenzsystem entwickelt werden, welches durch die Integration eines optischen Kohärenztomographen (OCT) hochpräzise Eingriffe am Patienten ermöglicht. Grundlage ist eine multimodale Bildregistrierung zwischen einem präoperativ akquirierten CT- und einem intraoperativ akquirierten OCT-Datensatz mit der eine Ausrichtung des Roboters erfolgen soll.Team:Jahr: 2010Förderung: Deutsche Forschungsgemeinschaft (DFG)
![]()
![]()
-
GentleCIEntwickelt werden neuartige, steuerbare Elektroden, die sich mit Hilfe einer integrierten Mikroaktorik berührungsfrei und damit risikolos in die spiralförmig gewundene Cochlea einführen lassen. Diese Mikroaktorik wird durch Elektrodenelemente aus Formgedächtniswerkstoffen realisiert, die durch Körpertemperatur in die gewünschte Form gebracht werden. Das Projekt wird in Kooperation mit der HNO-Klinik der MHH durchgeführt.Team:Jahr: 2010Förderung: BMBF
![]()
![]()
-
Optisch kontrollierte, automatisierte Insertion einer Cochlear Implant ElektrodeDie bislang einzig wirksame Behandlung von hochgradiger Schwerhörigkeit oder Taubheit besteht in der Implantation eines Multielektrodenarrays in die Hörschnecke (Cochlear Implant, CI), mit dem der Hörnerv elektrisch stimuliert wird. Im Rahmen des im Projekt „Roboterassistierte Chirurgie“ verfolgten Ansatzes eines minimalinvasiven Eingriffes stellt sich das Problem einer Insertion des Implantates durch den gebohrten, engen Stichkanal. Das Projekt wird in Kooperation mit der HNO-Klinik der MHH durchgeführt.Team:Jahr: 2010Förderung: Deutsche Forschungsgemeinschaft (DFG)
![]()
![]()
-
Roboterassistierte ChirurgieIm Zentrum dieser Forschungsarbeit steht die Entwicklung eines Assistenzsystems für hochgenaue, minimalinvasive chirurgische Eingriffe an der Schädelbasis. In Zusammenarbeit mit der Klinik für Hals-Nasen-Ohren-Heilkunde der Medizinischen Hochschule Hannover werden Verfahren entwickelt, die eine mit konventionellen Mitteln nicht erreichbare Operationssicherheit und Genauigkeit erzielen sollen.Team:Jahr: 2010
![]()
![]()
-
Analyse der frühembryonalen HerzentwicklungExterne Einflüsse auf die kardiale Frühentwicklung im embryonalen Stadium spielen eine große Rolle bei der späteren kardiovaskulären Ausbildung und Leistungsfähigkeit. Insbesondere in der ersten Woche des Wachstums besteht aus diesem Grund der Bedarf die relevanten Zusammenhänge zu erforschen.Team:Jahr: 2010Förderung: Deutsche Forschungsgemeinschaft (DFG)
![]()
![]()
-
Situsnahes mechatronisches Assistenzsystem für hochgenaue Eingriffe am Schädel (Mini-Hexapod)Im Rahmen einer Forschungskooperation mit der Klinik für HNO der MHH wird ein miniaturisierter, parallelkinematischer Roboter konzipiert und prototypisch aufgebaut, der aufgrund seiner geringen Abmessungen direkt am Schädel des Patienten verankert werden kann. Er dient als Basis für unterschiedliche Eingriffe, wie beispielsweise die minimal invasive Cochlea Implantation zur Behandlung innenohrbedingter Taubheit.Team:Jahr: 2011Förderung: Deutsche Forschungsgemeinschaft (DFG)
![]()
![]()
-
Roboterassistierte LaserosteotomieDie Laserosteotomie ist für eine Vielzahl klinisch relevanter Indikationen von Interesse. Die beim Materialabtrag entlang definierter Geometrien auftretenden Problemstellungen zeichnen sich dabei im Wesentlichen auf den Gebieten der Bahnplanung, der hochgenauen Strahlführung, der Mensch-Maschinen-Schnittstelle und der Schnitttiefenbestimmung ab. Am Institut für Mechatronische Systeme wird daher in Kooperation mit der KUKA Laboratories GmbH ein System für die roboterassistierte Laserosteotomie (RaLo) bestehend aus einem Leichtbauroboter (KUKA LBR), einem Kamerasystem, einem optischen Kohärenztomograph (OCT) und einem Er:YAG-Laser zur Demonstration einer Beispielanwendung aufgebaut.Team:Jahr: 2011Förderung: KUKA Laboratories GmbH
![]()
![]()
-
Entwicklung chirurgischer Instrumente für die Single-Port-LaparoskopieBei laparoskopischen Eingriffen wird die Bauchhöhle des Patienten durch einen kleinen Schnitt eröffnet. In den so geschaffenen Zugang wird ein Laparoskop eingeführt, um die inneren Organe auszuleuchten, optisch zu erfassen und dem Mediziner durch eine geeignete visuelle Darstellung anzuzeigen. Bei einer Single-Port Operation werden neben dem Laparoskop mindestens zwei weitere Instrumente zur Gewebemanipulation durch dieselbe Öffnung in die Bauchhöhle eingebracht. Erfolgt dieser Zugang im Bauchnabel ist die Narbe später kaum mehr zu erkennen. Neben dem daraus resultierenden guten kosmetischen Ergebnis, hat die Single-Port Laparoskopie die Vorteile eines geringen Blutverlustes und einer schnellen Genesung. Um das Einsatzgebiet für diese Operationstechnik zu erweitern werden neue medizintechnische Systeme benötigt. Diese sollen insbesondere eine hohe Beweglichkeit der Endeffektoren in einem großen kollisionsfreien Arbeitsraum besitzen.Team:Jahr: 2011
![]()
![]()
-
Mikrotechnologien und Systeme für die roboterassistierte Laser-StimmlippenchirurgieZiel des Projekts ist die Entwicklung eines neuartigen roboterassistierten Systems für die Laser-Mikrochirurgie speziell für Eingriffe an den Stimmlippen. Die pathologischen Gewebestrukturen werden präoperativ identifiziert und bilden die Grundlage der Operationsplanung. Eine intraoperative duale Bildgebung verfolgt das Ziel einer echtzeitfähigen Navigation über eine intuitive Chirurg-Roboter-Schnittstelle mit einem Augmented Reality System. Für die präzise Positionierung des gewebeabtragenden Lasers gilt es ein neuartiges Endoskop zu entwickeln. Die Herausforderung liegt in der kompakten Systemintegration der mikro-opto-mechatronischen Komponenten. Kognitive Strategien erhöhen die Sicherheit und die Qualität des operativen Eingriffs weiter.Team:Jahr: 2012Förderung: EU, FP7
![]()
![]()
-
Schnittstellen zur Anbindung eines Roboters in ein bildgestütztes TherapiesystemZiel dieses Kooperationsprojekts mit der KUKA Laboratories GmbH ist ein generisches Schnittstellenkonzept zur Anbindung eines KUKA Leichtbauroboters an ein bildgestütztes Therapiesystem zu entwickeln. Hierdurch wird eine leichtere Anbindung des Leichtbauroboters an ein Produkt eines Medizinproduktherstellers angestrebt. Zur Validierung des Systemkonzepts wird der KUKA LBR über eine generische Implementierung der Schnittstellen in die MediLAB-Umgebung des Medizintechniklabors des Institutes integriert.Team:Jahr: 2012Förderung: KUKA Laboratories GmbH
![]()
![]()
-
Intraoperative Registrierung durch Endoskopie der KnochenbälkchenDas Projekt iBoneRegistration erforscht die Endoskopie von Knochenbälkchen (Spongiosa) für die intraoperative Registrierung in der navigierten Knochenchirurgie. Durch ihre unverwechselbare strukturelle Beschaffenheit und Darstellbarkeit in präoperativer Bildgebung sind Knochenbälkchen optimal als Merkmale für die eindeutige räumliche Zuordnung von präoperativen Daten zur intraoperativen Lage geeignet.Team:Jahr: 2014Förderung: DFG
![]()
![]()
-
Genauigkeitssteigerung für die Roboterassistierte ChirurgieIm Zentrum dieser Forschungsarbeit steht die Entwicklung eines Assistenzsystems für hochgenaue, minimalinvasive chirurgische Eingriffe an der Schädelbasis. Es werden Verfahren entwickelt, die eine mit konventionellen Mitteln nicht erreichbare Operationssicherheit und Genauigkeit erzielen sollen. Insbesondere geht es hierbei um das Setzen von Bohrkanälen für die Cochlear-Implantation mittels Roboter und optischer Navigation.Team:Jahr: 2014
![]()
![]()
-
RoboJiGPräklinische Realisierung einer ganzheitlich minimal-invasiven Cochlea-Implantat-Versorgung durch patientenspezifische BohrschablonenTeam:Jahr: 2014Förderung: BMBF
![]()
![]()
-
Hand-Held Projection and Measurement System for Surgical InterventionsIn Augmented reality, image overlay projection is a technique that would help the surgeons to view the underlying anatomical structures directly on the surface of the skin or organ of the patient. Within the scope of the Tailored Light Scholarship Program , a novel hand-held projector system would be developed that would allow the images of 3-D patient-specific models to be projected directly onto the surface of the organ intraoperatively without the need of intrusive hardware around the surgical scene. This would circumvent the problems of view reorientation, where the surgeon has to divert his sight from the patient to the monitors with patient information like CT, MRI etc., thus helping him in performing the surgeries without any strain.Team:Jahr: 2016Förderung: Lower Saxony Ministry for Science and Culture
![]()
![]()
-
Evaluation des laryngealen Adduktionsreflexes mit einem mechatronischen Mikrotropfen-LaryngoskopIm Rahmen dieses interdisziplinären Projektes wird in Kooperation mit der Klinik für Phoniatrie und Pädaudiologie (Leitung: Prof. Dr. med. Dr. med. h.c. Martin Ptok) der Medizinischen Hochschule Hannover (MHH) ein neuartiges, endoskopisches System zur Untersuchung des laryngealen Adduktionsreflexes (LAR) entwickelt und im klinischen Einsatz erprobt. Die Auslösung des LAR soll durch die Applikation eines beschleunigten Tröpfchens erfolgen. Zur Beobachtung der Reflexantwort wird ein Hochgeschwindigkeits-Kamerasystem eingesetzt. Die Einbindung bildverarbeitender Algorithmen soll den Automatisierungs- und Objektivitätsgrad des Untersuchungsverfahrens steigern.Team:Jahr: 2016Förderung: DFG
![]()
![]()
-
OPhonLas: OCT-geregelte Laserablation bei Stimmlippen-PhonationIm Rahmen dieses EFRE-geförderten Projektes soll ein rigides, anatomisch geformtes Laryngoskop entwickelt werden, das mit einem steuerbaren Ablationslaser ausgestattet ist. Neben der Anwendung auf ruhenden Stimmlippen soll ein Laserschnitt auch während einer Phonation–also auf schwingenden Stimmlippen–durchgeführt werden. Dadurch wird die Behandlung bestimmter Pathologien ermöglicht und der funktionelle Therapieerfolg direkt sichtbar gemacht. Die hohen Anforderungen an die Echtzeit-Regelung des Lasers setzen die Fusion von Stereobilddaten und optischer Kohärenztomographien voraus.Team:Jahr: 2017Förderung: EFRE (Europäischer Fonds für regionale Entwicklung)Laufzeit: 3 Jahre
![]()
![]()
-
Haley - Hydraulischer schlangenartiger Roboter für die EndoskopieEndoskopische Verfahren für Diagnostik und Therapie verändern die Medizin nachhaltig. Für einen erfolgreichen Eingriff müssen zwei wichtige Faktoren erfüllt sein: Um schwer zugängliche Gebiete erreichen zu können, ist eine gute Manövrierbarkeit nötig. Zusätzlich erfordert der Eingriff im Zielbereich eine hohe Struktursteifigkeit, um Manipulationskräfte aufnehmen zu können und dem Arzt eine feste Arbeitsplattform zur Verfügung zu stellen. Heutige Endoskope können jedoch nicht beide Anforderungen gleichzeitig erfüllen. Es werden entweder rein starre oder rein flexible Endoskope verwendet, äußerst selten sind – selbst in der Forschung – versteifbare Mechanismen anzutreffen. Als Brückenschlag zwischen flexiblen und starren Robotern soll daher ein hydraulisch aktuiertes, schlangenartiges Endoskop in dem HALEy Projekt erforscht werden.Team:Jahr: 2020Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 10/2020-04/2023
![]()
![]()
-
Roboter-assistierte Instrumentenhandhabung für ChirurgieassistenzRobotische Chirugie-Assistenten, auch als Robotic Scrub Nurses (RSN) bezeichnet, haben das Potential, einen Chirurgen während einer Operation (OP) zu unterstützen und langfristig eine wirtschaftliche Alternative zur klassisischen OP-Assistenz darzustellen. In diesem Projekt werden die Hauptaufgaben einer OP-Assistenz (Detektion, Lokalisierung und Greifen von chirurgischen Instrumenten) untersucht und addressiert. Das Projekt wird in Zusammenarbeit mit der Medizinischen Hochschule Hannover (MHH) dürchgeführt und umfasst die Nutzung von Deep Learning- und Soft Robotics-Methoden.Team:Jahr: 2020Laufzeit: 04/2020-09/2023
![]()
![]()
-
KI-basierte Bildanalyse in der TriebwerksinstandsetzungDas vorliegende Teilprojekt findet innerhalb der „Technologieinitiative Triebwerksinstandsetzung“ (TinTin) statt, welche ein Verbundprojekt zwischen der MTU Maintenance GmbH, der TU Braunschweig und der Leibniz Universität Hannover darstellt. Der Forschungsschwerpunkt liegt hierbei in der Entwicklung von innovativen Wartungstechnologien für Flugzeugtriebwerke. Innerhalb des Teilprojekts sollen mithilfe von Bildverarbeitungsalgorithmen Inspektionsprozesse teilautomatisiert werden. Hierbei geht es konkret um die Schadensbefundung auf Röntgenbildern mittels neuronaler Netze.Team:Jahr: 2021Förderung: Investitions- und Förderbank Niedersachsen (NBank)Laufzeit: 01/2021-12/2023
-
Entwicklung eines 3D-Bio-Extrusions-Druckers zur Fertigung individualisierter Herzmuskelimplantate für die Therapie von Herzinsuffizienz (Indiheart)Im Rahmen dieses interdisziplinären Projekts wird mit der Universitätsmedizin Göttingen (Leitung Prof. Dr. med. Wolfram-Hubertus Zimmermann), dem Max-Planck-Institut für Dynamik und Selbstorganisation Göttingen (Leitung: Prof. Dr. rer. nat. Eberhardt Bodenschatz) sowie dem Deutschen Primatenzentrum in Göttingen (Leitung: Prof. Dr. med. vet. Rabea Hinkel) an der Entwicklung individualisierter Herzmuskelimplantate geforscht. Die durch die Implantate aufgebrachte Kraft sollen den Herzmuskel bei Insuffizienz bestmöglich unterstützen und die Pumpleistung bestmöglich wiederherstellen. Hauptaugenmerk der Forschung am imes stellt dabei die Entwicklung eines roboterbasierten, vollsterilisierbaren 3D Bio-Extrusions-Druckers sowie dessen Steuerung dar. Der Druckprozess soll weiterhin automatisiert werden, um Präzision und Qualität des Herzgewebe sicherstellen zu können.Team:Jahr: 2021Förderung: Bundesministerium für Bildung und Forschung (BMBF)Laufzeit: 01/2021 - 12/2023
![]()
![]()
-
Personalisierte Zelltherapie mit iPSC-abgeleiteten Kardiomyozyten (TACTiC)Die Nachwirkungen eines Herzinfarkts können unter anderem zu einer chronische Herzschwäche führen. Neue minimalinvasive Behandlungsmethoden injizieren Herzstammzellen in das (schlagende) Herz die zur Regeneration des Herzmuskelgewebes beitragen sollen. Im Rahmen dieses Projektes wird ein mechatronischer Applikator entwickelt, der diese Eingriffe automatisieren soll. Dadurch wird die Reproduzierbarkeit erhöht und die individuellen anatomischen Besonderheiten des Empfängerherzens lassen sich besser berücksichtigen. Im Vordergrund stehen dabei die Konstruktion des Applikators und die hochpräzise Positionierung der Injektionsnadel mittels bildgebender Sensorik. Weitere Kernaspekte sind die Kontrolle der Eindringtiefe sowie die genaue Volumenanalyse der Injektionsmenge.Team:Jahr: 2022Förderung: Bundesministerium für Bildung und Forschung (BMBF)Laufzeit: 06/2022-05/2025


































