Mensch-Roboter-Kollaboration mit parallelkinematischen Maschinen (MRK-PKM)
| Team: | M. Sc. Aran Mohammad |
| Jahr: | 2021 |
| Förderung: | Deutsche Forschungsgemeinschaft (DFG) |
| Laufzeit: | 03/2021-09/2023 |
Mensch-Roboter-Kollaboration mit parallelkinematischen Maschinen
Durch die Mensch-Roboter-Kollaboration (MRK) ist eine Produktivitätssteigerung von bisher nicht voll automatisierten Industriearbeitsplätzen möglich, indem die Einrichtung und Anpassung kollaborativer Roboter an neuen Anforderungen beispielsweise durch eine Handführung vom Menschen einen reduzierten Programmieraufwand und ein geringeres Fachwissen benötigen. Jedoch ist das direkte Mit- und Nebeneinanderarbeiten von Mensch und Roboter bislang nur mit spezialisierten seriellkinematischen Robotern möglich, deren Antriebe die Massen der nachfolgenden Glieder beschleunigen. Aufgrund der dabei bewegten hohen Massen wird der Roboter zur Einhaltung der zulässigen maximalen Kollisionsenergie mit niedriger Geschwindigkeit betrieben.
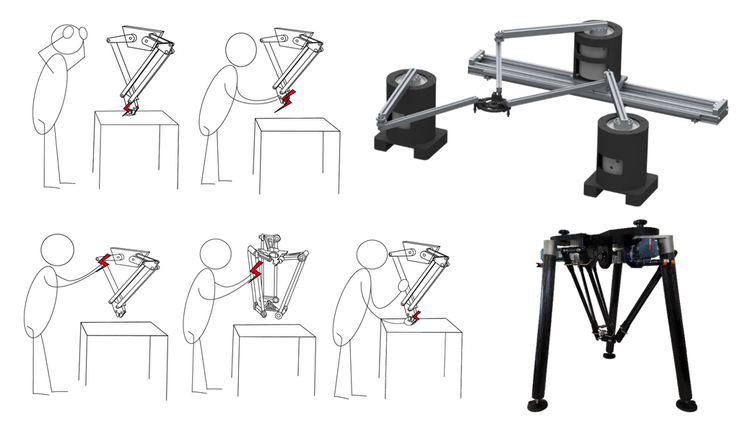
Im Gegensatz zu seriell-kinematischen Robotern zeichnen sich parallel-kinematische Maschinen (PKM) durch mehrere parallele kinematische Ketten aus, die mit einer bewegten Endeffektor-Plattform verbunden sind. Weiterhin besteht bei PKM keine Notwendigkeit, die Antriebe in den kinematischen Ketten zu verwenden, da sie prinzipiell gestellfest angeordnet und ohne reibungsbehaftete Getriebe eingesetzt werden können.
Eine Einschränkung von PKM für die MRK stellt jedoch die von den parallel angeordneten Ketten ausgehende Gefahr von Klemmungen des Menschen in den Robotersegmenten dar. Eine fehlende Unterscheidung zwischen Kollisionen und Klemmung und deren gleiche Behandlung kann unter Umständen dazu führen, dass eine Klemmung als Kollision erkannt und behandelt wird. Eine Rückzugsbewegung des Roboters kann in diesem Fall die Klemmsituation verschlimmern.
Dieses Problem wird durch dieses Forschungsvorhaben adressiert, indem dafür grundsätzliche Fragen bzgl. der Klemmgefahr, sowie Vermeidungs-, Erkennungs- und Reaktionsmethoden zu beantworten sind.
Hierzu zählt eine systematische Betrachtung möglicher Kontakt- und Klemmstellen durch kinematische und kinetostatische Berechnung aller Teilkörper der PKM, um die auftretenden Kräfte während eines Kontaktes zu berechnen. Dadurch sind generelle Aussagen über die Sicherheit der untersuchten PKM möglich. Weiterhin soll das Ergebnis der Klemmstellen-Analyse in die Bahnplanung eingesetzt werden, um die Klemmgefahr neben der Positionieraufgabe zu optimieren.
Aufbauend darauf sollen Erkennungsmethoden und gefährdungsreduzierende Reaktionsstrategien des Roboters für Kollisionen und Strukturklemmungen entwickelt werden. Hierzu zählen Ansätze zur Detektion, Lokalisation und Identifikation des Kontaktes zwischen Mensch und PKM. Es erfolgt eine Übertragung von bewährten Regler- und Beobachterkonzepten aus der Mensch-Roboter-Kollaboration mit Seriellkinematiken auf PKM. Die erforschten Methoden und Verfahren werden an realen PKM implementiert und validiert.