Laufende Forschungsprojekte
Modular strukturiertes Motion-Control-System für Robotik und Handling
| Team: | Dipl.-Ing. Julian Öltjen |
| Jahr: | 2012 |
| Förderung: | Lenze Automation GmbH |
| Ist abgeschlossen: | ja |
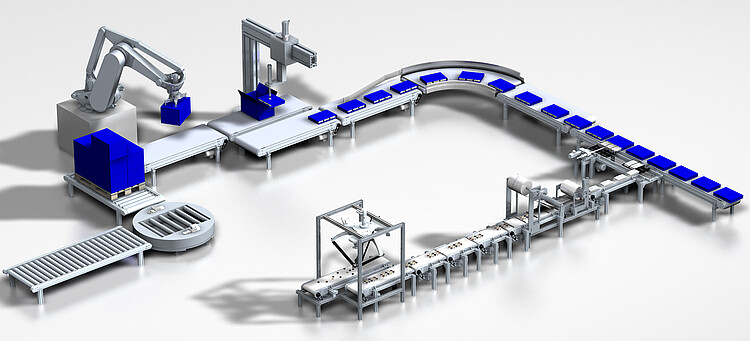
Die Optimierung automatisierter Prozesse, beispielsweise im Bereich industrieller Produktion und Fertigung, erfordert leistungsfähige Hard- und Software, mit deren Hilfe komplexe Bewegungsabläufe sicher und in Echtzeit gesteuert werden können.
In diesem Projekt wird eine leicht bedienbare, modular strukturierte und damit flexible Plattform zur Ansteuerung unterschiedlichster Robotik-Anwendungen entwickelt. Neben etablierten Systemen, wie z.B. Scara-, Delta- oder Knickarm-Kinematiken, bieten unterschiedliche Schnittstellen die Möglichkeit, individuelle Kinematiken anzusteuern. Das Ziel ist die Vereinfachung der Programmierung und Inbetriebnahme komplexer, mehrachsiger Produktionsanlagen.
Abgeschlossene Forschungsprojekte
Modular strukturiertes Motion-Control-System für Robotik und Handling
| Team: | Dipl.-Ing. Julian Öltjen |
| Jahr: | 2012 |
| Förderung: | Lenze Automation GmbH |
| Ist abgeschlossen: | ja |
Die Optimierung automatisierter Prozesse, beispielsweise im Bereich industrieller Produktion und Fertigung, erfordert leistungsfähige Hard- und Software, mit deren Hilfe komplexe Bewegungsabläufe sicher und in Echtzeit gesteuert werden können.
In diesem Projekt wird eine leicht bedienbare, modular strukturierte und damit flexible Plattform zur Ansteuerung unterschiedlichster Robotik-Anwendungen entwickelt. Neben etablierten Systemen, wie z.B. Scara-, Delta- oder Knickarm-Kinematiken, bieten unterschiedliche Schnittstellen die Möglichkeit, individuelle Kinematiken anzusteuern. Das Ziel ist die Vereinfachung der Programmierung und Inbetriebnahme komplexer, mehrachsiger Produktionsanlagen.