Robuste Schwimmwinkelschätzung, basierend auf sensitivitätsbasierter Parameteradaption und nichtlinearen Beobachterstrukturen
| Team: | M.Sc. Mark Wielitzka |
| Jahr: | 2013 |
| Datum: | 16-12-13 |
| Ist abgeschlossen: | ja |
Stetig steigende Anforderungen an Sicherheit und Komfort in modernen Kfz, einhergehend mit steigender, verfügbarer Rechenleistung haben in den letzten Jahren zu einer erhöhten Anzahl von Fahrerassistenzsystemen in heutigen Fahrzeugen geführt. Besonderer Fokus wird dabei auf die Steigerung der aktiven Sicherheit, also das Verhindern von Unfällen gelegt. Beispielsweise wird die Kontrolle über das Fahrzeug in querdynamisch kritischen Fahrsituationen durch das Electronic Stability Program (ESP) erhöht, wodurch die Anzahl an Unfällen, resultierend aus Schleudervorgängen reduziert werden kann.
Zur Verbesserung des ESP eignet sich eine Erweiterung der Regelung von einer reinen Gierratenregelung (Drehung um die Fahrzeughochachse) auf die zusätzliche Regelgröße des Schwimmwinkels (Winkel zwischen der Fahrzeuglängsachse und dem Geschwindigkeitsvektor), welche die Kontrolle des Fahrers über das Fahrzeug ideal beschreibt. Da der Schwimmwinkel nur durch sehr kostenintensive Sensorik direkt messbar ist, dessen Implementierung in Serienfahrzeugen nicht wirtschaftlich ist, bedarf es einer robusten Schätzung dieser Zustandsgröße in allen Fahrsituationen.
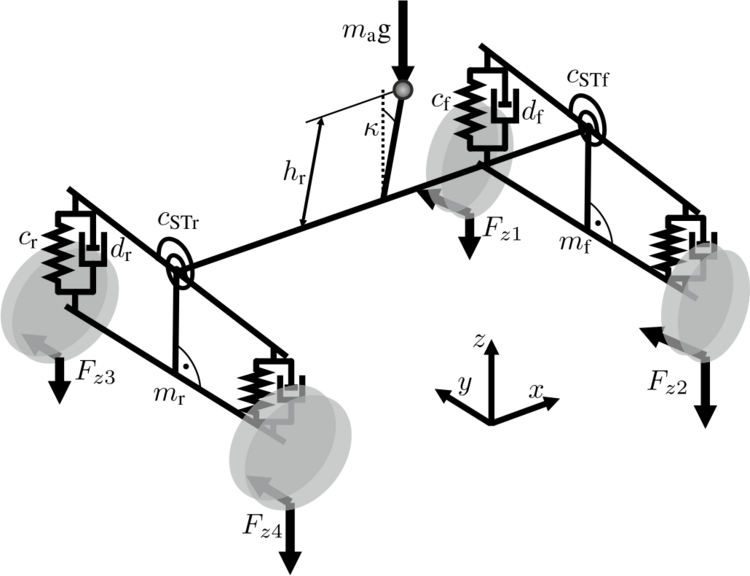
Aus diesem Grund soll im aktuellen Forschungsvorhaben ein robuster, modellbasierter Schwimmwinkelschätzer auf Basis einer sensitivitätsbasierten Parameteradaption realisiert werden. Dazu wird durch unterscheidliche Modelle die Fahrzeugquerdynamik abgebildet und darauf aufbauend verschiedene Parameter, wie z.B. der Reibbeiwert oder die Masse des Fahrzeugs, sensitivitätsbasiert adaptiert. Eine robuste, störunanfällige Schätzung des Schwimmwinkels soll durch Vergleich und Optimierung verschiedener nichtlinearer Beobachterkonzepte bezüglich unterschiedlicher Fahrmanöver erreicht werden.
{kind=link}