Inhalt
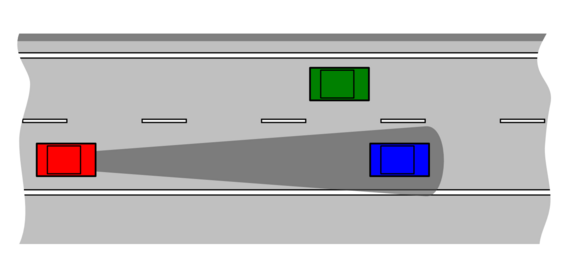
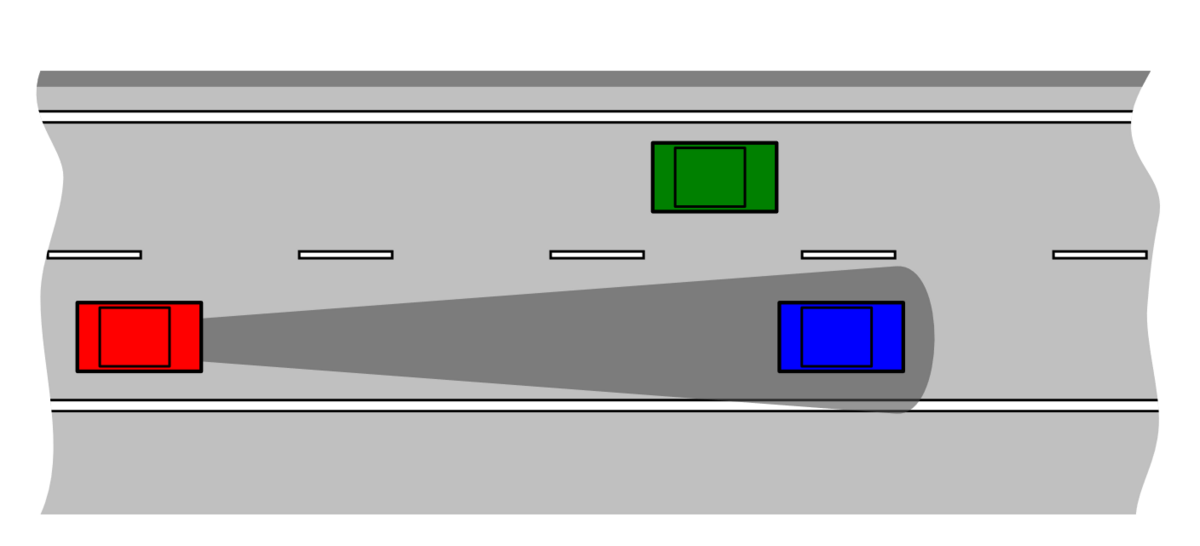
Im Rahmen des Bachelorprojekts "Teilautomatisiertes Fahren" bauen die Studierenden in 2er- oder 3er-Teams einen einfachen mobiler Roboter auf und statten diesen mit einem Abstandsregeltempomaten sowie aktivem Spurhalteassistent aus. Entwicklungsziel ist es, dass der Roboter einem vorausfahrenden Fahrzeug auf unbekannter Strecke auch bei plötzlichen Geschwindigkeitsänderungen mit konstantem Abstand und mit minimalem Energieaufwand folgt. Hierzu muss der Roboter mit zusätzlicher Sensorik ausgestattet und ein geeigneter Regelalgorithmus entworfen werden. Auch soll das Roboterfahrzeug durch Konstruktion und 3D-Druck von neuen Anbauteilen optisch oder funktional aufgewertet werden. Die Studierenden erhalten hierbei sowohl wichtige Kompetenzen für das projektbezogenen Arbeiten im Team als auch einen multidisziplinären Einblick in das Ingenieurstudiums.

Organisation
- Termine
- Ort und Zeit werden über Stud.IP bekanntgegeben
- Kommunikation
- Alle weiteren Informationen, sowie Unterlagen etc. sind in der entsprechenden Stud.IP-Gruppe zu finden.
Ansprechpartner


30823 Garbsen