Ongoing Research Projects
SyMoLearn - Physikalische Modellierung & Maschinelles Lernen: Symbiose zur Optimierung mechatronischer Systeme
| Team: | Zygimantas Ziaukas |
| Year: | 2020 |
| Funding: | Leibniz Young Investigator Grant |
| Duration: | 2 Jahre |
| Is Finished: | yes |
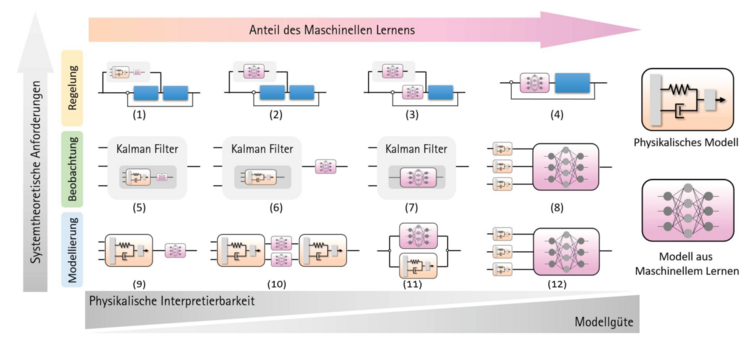
Modellbasierte Verfahren haben in den vergangenen Jahrzehnten innerhalb der Ingenieurswissenschaften und somit auch der Mechatronik zu einer weitreichenden Gütesteigerung dynamischerSysteme geführt. Die häufig verwendete pysikalische Modellbildung erhöht das Systemverständnis und ermöglicht damit eine Verbesserung der Beobachter- und Regelungsstrukturen. Die Genauigkeit der Modellierung ist dabei prinzipbedingt auf den Detailgrad der physikalischen Modelle beschränkt. Eine Genauigkeitssteigerung würde nur mit erhöhtem Detailgrad und somit höherem Rechenaufwand möglich sein. Einen alternativen Ansatz zur physikalischen Modellierung bieten Verfahren des Maschinellen Lernens. Diese Verfahren können gleichermaßen für die Modellierung, darüber hinaus aber auch direkt für Beobachtung und Regelung dynamischer Systeme eingesetzt werden. Dabei bieten sie das Potential den maximalen Informationsgehalt der erfügbaren Daten des jeweiligen Systems auszunutzen und somit eine Genauigkeitssteigerung zu erreichen. Demnach ermöglichen sie in diesen Bereichen eine sprunghafte Verbesserung der Güte. Maßgebliche Nachteile bestehen jedoch in dem Verlust der physikalischen Interpretierbarkeit der Modelle sowie der zumeist Notwendigkeit großer Mengen an Daten. Um die beschriebenen Vorteile zusammenzuführen und die Nachteile zu beseitigen, bietet sich eine Symbiose beider Verfahren an. Dabei wird eine hybride Verwendung ausgenutzt, um beispielsweise eine verbesserte Genauigkeit unter Beibehaltung der physikalischen Interpretierbarkeit zu ermöglichen. Der Anteil des jeweiligen Verfahrens ist variabel und abhängig von der betrachteten Zielgröße und Anwendung zu wählen. Das Ziel ist somit eine Optimierung mechatronischer Systeme durch die Hinzunahme von Verfahren des Maschinellen Lernens. Die erarbeiteten Verfahren werden an zwei verschiedenen Prüfständen entwickelt und analysiert. Dabei wird zum einen ein grundlegendes Systeme, anhand eines inversen Doppelpendels betrachtet. Zum anderen dient ein elektrisch angetriebenes Serienfahrzeug als anwendungsnaher Versuchsträger. Je nach Prüfstand werden unterschiedliche Zielgrößen adressiert und die entsprechende Kombination der Verfahren optimiert. Schließlich werden die Methoden auf die Echtzeitsysteme der Prüfstände übertragen. Abschließend werden die erarbeiteten Herangehensweisen mit bestehenden Verfahren verglichen und die verbesserte Güte aufgezeigt.
Finished Research Projects
SyMoLearn - Physikalische Modellierung & Maschinelles Lernen: Symbiose zur Optimierung mechatronischer Systeme
| Team: | Zygimantas Ziaukas |
| Year: | 2020 |
| Funding: | Leibniz Young Investigator Grant |
| Duration: | 2 Jahre |
| Is Finished: | yes |
Modellbasierte Verfahren haben in den vergangenen Jahrzehnten innerhalb der Ingenieurswissenschaften und somit auch der Mechatronik zu einer weitreichenden Gütesteigerung dynamischerSysteme geführt. Die häufig verwendete pysikalische Modellbildung erhöht das Systemverständnis und ermöglicht damit eine Verbesserung der Beobachter- und Regelungsstrukturen. Die Genauigkeit der Modellierung ist dabei prinzipbedingt auf den Detailgrad der physikalischen Modelle beschränkt. Eine Genauigkeitssteigerung würde nur mit erhöhtem Detailgrad und somit höherem Rechenaufwand möglich sein. Einen alternativen Ansatz zur physikalischen Modellierung bieten Verfahren des Maschinellen Lernens. Diese Verfahren können gleichermaßen für die Modellierung, darüber hinaus aber auch direkt für Beobachtung und Regelung dynamischer Systeme eingesetzt werden. Dabei bieten sie das Potential den maximalen Informationsgehalt der erfügbaren Daten des jeweiligen Systems auszunutzen und somit eine Genauigkeitssteigerung zu erreichen. Demnach ermöglichen sie in diesen Bereichen eine sprunghafte Verbesserung der Güte. Maßgebliche Nachteile bestehen jedoch in dem Verlust der physikalischen Interpretierbarkeit der Modelle sowie der zumeist Notwendigkeit großer Mengen an Daten. Um die beschriebenen Vorteile zusammenzuführen und die Nachteile zu beseitigen, bietet sich eine Symbiose beider Verfahren an. Dabei wird eine hybride Verwendung ausgenutzt, um beispielsweise eine verbesserte Genauigkeit unter Beibehaltung der physikalischen Interpretierbarkeit zu ermöglichen. Der Anteil des jeweiligen Verfahrens ist variabel und abhängig von der betrachteten Zielgröße und Anwendung zu wählen. Das Ziel ist somit eine Optimierung mechatronischer Systeme durch die Hinzunahme von Verfahren des Maschinellen Lernens. Die erarbeiteten Verfahren werden an zwei verschiedenen Prüfständen entwickelt und analysiert. Dabei wird zum einen ein grundlegendes Systeme, anhand eines inversen Doppelpendels betrachtet. Zum anderen dient ein elektrisch angetriebenes Serienfahrzeug als anwendungsnaher Versuchsträger. Je nach Prüfstand werden unterschiedliche Zielgrößen adressiert und die entsprechende Kombination der Verfahren optimiert. Schließlich werden die Methoden auf die Echtzeitsysteme der Prüfstände übertragen. Abschließend werden die erarbeiteten Herangehensweisen mit bestehenden Verfahren verglichen und die verbesserte Güte aufgezeigt.