Evaluation of the laryngeal adduction reflex via laryngoscopic microdroplet application and image processing
| Team: | Jacob F. Fast, M.Sc. |
| Year: | 2016 |
| Funding: | DFG |
| Is Finished: | yes |
Pathologies of the laryngeal adduction reflex (LAR) play an important role in the development of so-called aspiration pneumonia, which is caused by foreign particles that have penetrated the respiratory tract (e.g. food particles). The LAR characterizes the reflexive vocal fold closure of the upper respiratory tract. Pneumonia poses a great danger to elderly people - in the age group 65 and older, it is one of the ten most frequent causes of death.
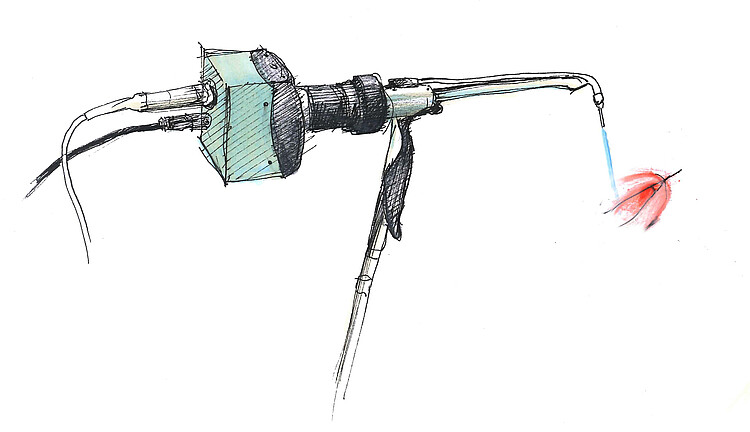
This interdisciplinary project aims to develop an endoscopic, mechatronic system for the quantitative evaluation of the LAR. On the medical side, the Department of Phoniatry and Pedaudiology at Hanover Medical School (MHH) (director: Professor Dr. med. Dr. med. h.c. Martin Ptok) is involved in the project. The clinical partner was able to show that LAR triggering is possible by stimulation of the vocal folds with an accelerated droplet (Microdroplet Impulse Testing of the LAR, MIT-LAR). Reflex strength and latency is evaluated optically. Using image processing algorithms, the degree of automation in the reflex characterization and thus, the objectivity of the examination procedure wil be increased.
Further project perspectives include the insertion of additional information into the live endoscopic image in the context of augmented reality. The clinical testing of developed prototypes of the system at MHH is another important step on the way to routine diagnostics.