Electromagnetic bending actuator for endoscopic applications
| Team: | M. Sc. Svenja Spindeldreier (née Tappe) |
| Year: | 2013 |
| Funding: | DFG and Caroline Herschel Program of the Equal Opportunities Office |
| Duration: | 2013-2019 |
| Is Finished: | yes |
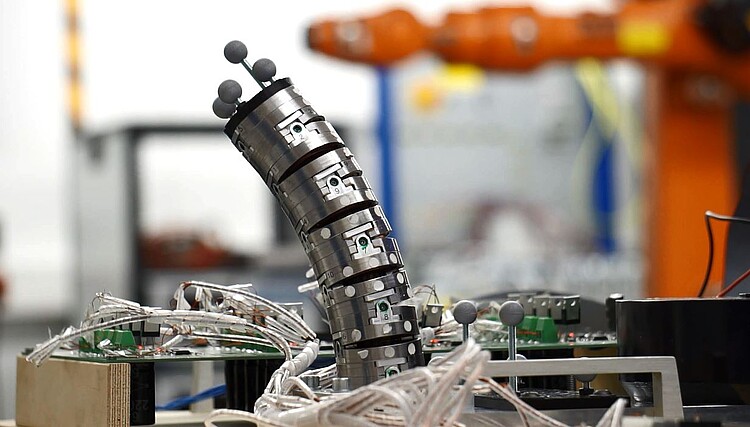
The main objective of this research project is to investigate a new concept of an actuated endoscope in cooperation with the Institute of Drive Systems and Power Electronics (IAL). Currently, flexible endoscopes are designed as a passive shaft with an actuated distal tip which includes imaging devices and the work channel for the application of surgical instruments. In general, the endoscope is inserted into the patient (e. g. natural orifice or surgical access) and gently fed forward. For examination and treatment, the distal tip can be rotated manually with Bowden wires in order to align the field of view of the camera. The use of a passive shaft may result in loop formation due to the interaction with anatomical structures and cause pain to the patient. Furthermore, there is a risk that advancing is inhibited because of the friction between tissue and endoscope, narrow anatomical structures and loops which may result in perforations and injuries to the surrounding tissue. In addition to that, existing passive systems cannot provide a stable work platform because the structural design is limited to withstand low manipulation forces from surgical interactions.
The prevention of the aforementioned criteria by actuating the endoscope system over the entire length is the aim of the project. Therefore, the IAL develops specific electromagnetic bending actuators with discrete joint states. In the first step, an individual research on the electromechanical actuator is conducted. With a corresponding number and arrangement of the components as well as the implementation of a follow-the-leader concept during the advance, a reduced load to the organ walls can be obtained. The actuation also allows withstanding higher manipulation forces.
In the first step the kinematics and dynamics are modeled by the imes and on that basis an optimal design and arrangement of the actuators will be derived in close cooperation with the IAL. Future tasks include the development of suitable control algorithms and the miniaturization of the snake's components.