Human-Robot Collaboration with Parallel Kinematic Machines
| Team: | M. Sc. Aran Mohammad |
| Year: | 2021 |
| Funding: | Deutsche Forschungsgemeinschaft |
| Duration: | 03/2021-09/2027 |
Human-Robot Collaboration with Parallel Kinematic Machines
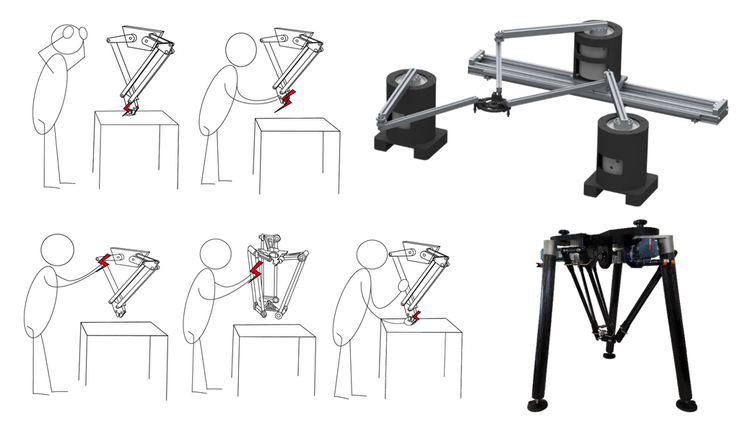
Within the project funded by the German Research Foundation, investigations are being conducted into how safe human-robot collaboration with parallel kinematic machines can be carried out. The main aspect of the research project is the detection of collisions and clamping between the human and the robot structure, as well as an appropriate reaction to them. This requires an analysis of clamping dangers and design measures, detection and reaction methods built on this analysis. Based on the research, danger-reducing collision and clamping reactions are determined. For the technical implementation of reactions to clamping and collision, observers are used that filter and merge available measured signals such as motor current and joint angle in a suitable form. In addition, the dynamic behavior of the robot with the human is controlled in order to reduce the forces from advance in the case of clamping and collision. The researched methods and procedures are implemented and validated on real parallel kinematic machines.