Mini-Projektor basierte Augmented Reality für medizinische Anwendungen
| Team: | M.Sc. Dipl.-Ing. (FH) Jan-Philipp Kobler |
| Jahr: | 2010 |
| Ist abgeschlossen: | ja |
Heutige chirurgische Eingriffe sind gekennzeichnet durch ein hohes Maß an Komplexität. Diese resultiert aus kontinuierlich steigenden Anforderungen, die an den ausführenden Chirurgen gestellt werden. So sind zunehmend feinere anatomische Strukturen Gegenstand von operativ durchgeführten Therapien. Gleichzeitig soll das postoperative Trauma des Patienten auf ein Minimum reduziert werden. Aus diesem Grund hat die minimalinvasive Chirurgie große Bedeutung erlangt. Eingriffe dieser Art zeichnen sich gegenüber konventioneller Chirurgie durch kleine Schnitte sowie die Nutzung natürlicher Zugangswege aus. Infolgedessen verkürzt sich die Erholungsphase, die für den Patienten mit geringen Schmerzen verbunden ist. Demgegenüber stehen eine verringerte Übersichtlichkeit des Operationsfeldes, verlängerte Operationszeiten sowie verzögerte Zugriffszeiten bei Komplikationen. Maßgeblich dafür verantwortlich ist die Tatsache, dass die visuelle Kontrolle des Eingriffs durch den Chirurgen lediglich auf Basis eines Endoskop-Bildes erfolgt.
Zusätzlich stehen dem Operateur Daten zahlreicher bildgebender Verfahren zur Verfügung. Zu nennen sind an dieser Stelle insbesondere die Computertomographie, die primär einer Visualisierung knöcherner Strukturen dient, sowie die Magnetresonanztomographie, die zur Diagnostik von Weichgewebsteilen eingesetzt wird. Auf Basis dieser Daten erfolgt die präoperative Planung der Intervention. Dabei stehen die Lokalisierung von anatomischen Risikostrukturen, wie beispielsweise Nerven oder Blutgefäßen, und die Festlegung von Zugangswegen und Instrumententrajektorien im Vordergrund. Die auf diesem Wege gewonnenen Planungsdaten müssen dem Chirurgen intraoperativ angezeigt werden.
Des Weiteren ermöglichen Navigationssysteme die Bestimmung der Position und Orientierung (Lage) von medizinischen Instrumenten sowie des Patienten im Raum. Durch eine Fusion dieser zusätzlichen Informationen mit den Planungsdaten, können Navigationsanweisungen generiert und dem Chirurgen dargestellt werden. Denkbar sind dabei beispielsweise Visualisierungen von Schnitt- und Bohrmarken, Risikostrukturen, Pfeildarstellungen sowie Materialeigenschaften.
Die größte Herausforderung liegt in diesem Zusammenhang weniger in der Akquise der Daten als vielmehr in der Wahl einer geeigneten Darstellungsweise. Etabliert hat sich zu diesem Zweck der Einsatz von Monitor-Systemen. Problematisch ist dabei einerseits, dass eine Vielzahl von visuellen Informationen simultan angezeigt werden. Der Chirurg muss daher den Umgang mit derartigen Systemen zunächst trainieren. Diese sind meist unverzichtbar, da bei minimalinvasiv durchgeführten Eingriffen, abgesehen vom Endoskopbild, keine Möglichkeit der Orientierung hinsichtlich des Operationsfeldes besteht. Andererseits gerät der Patient durch die Konzentration des Chirurgen auf einen Monitor aus dem Fokus. Der Blickwechsel zwischen Patient und Monitor führt zudem zu schneller Ermüdung sowie einem Verlust der Genauigkeit. Erschwerend kommt hinzu, dass eine Hand-Auge-Koordination nicht intuitiv möglich ist. Zusammen mit der anspruchsvollen Führung des zur minimalinvasiven Chirurgie eingesetzten Mikro-Instrumentariums resultiert eine erhebliche Belastung des Chirurgen während des Eingriffs.
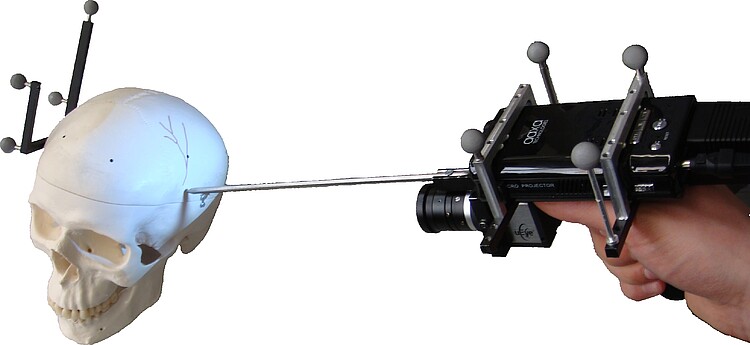
Zum Zwecke einer Optimierung der Darstellungsweise von Informationen sind Augmented-Reality-Ansätze Gegenstand aktueller Forschungen. Ziel ist dabei die Visualisierung von Daten unmittelbar im Blickfeld des Chirurgen. Dieser Ansatz basiert auf einer simultanen Darstellung der Realität, also des Patienten, und zusätzlicher visueller Informationen.