Technische Ausstattung
Das Institut für Mechatronische Systeme verfügt über gut ausgestattete Labore und Werkstätten. Nachstehende, beispielhaft aufgeführte Geräte stehen für Projekte und Dienstleistungen zur Verfügung.
Allgemein
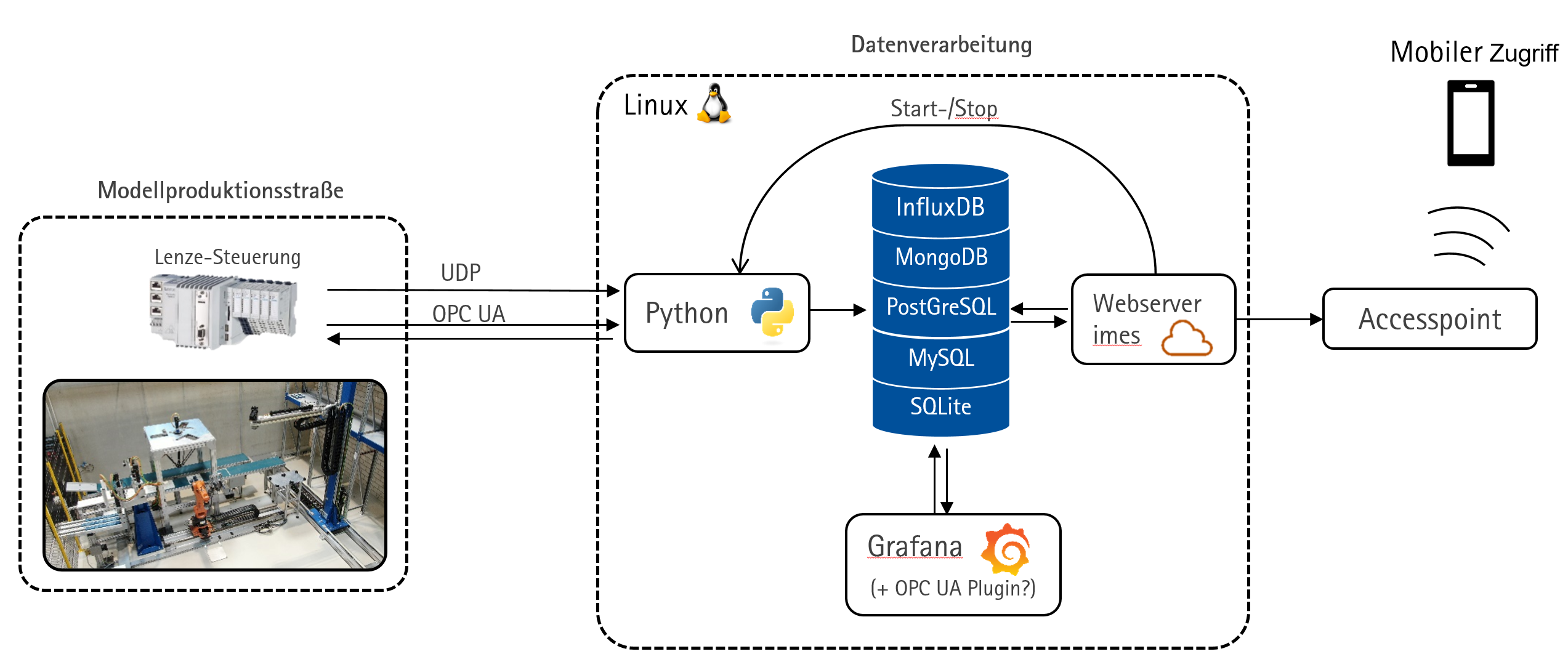
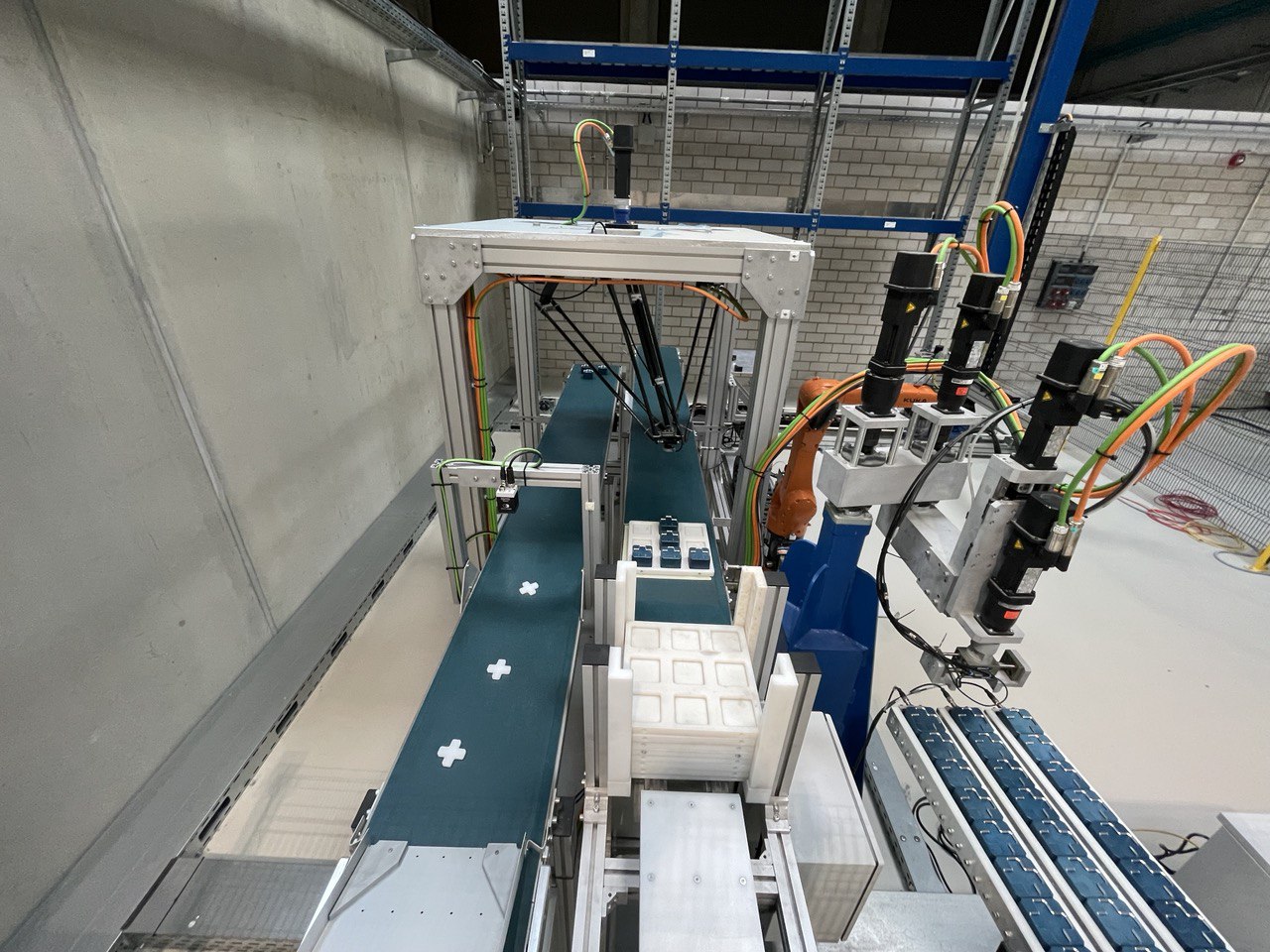
Industrie 4.0-Modellfabrik: Handhabungsprozess einer Verpackungsstraße
Dem imes steht eine Modellfabrik mit verschiedenen seriell- und parallelkinematischen Robotersystemen zur Verfügung, mit der ein vollautomatisierter Handhabungsprozess, ähnlich dem einer modernen Verpackungsstraße ausgeführt werden kann. Die Anlage ermöglicht zum Einen die applikationsnahe Evaluierung innovativer Methoden der Robotik und Regelung auf Basis modernster industrieller Antriebs- und Steuerungstechnik. Zum Anderen können fortschrittliche Methoden zur Analyse, Überwachung sowie Optimierung komplexer Prozessabläufe entwickelt und in realer Umgebung erprobt werden. Durch ein variables Energieversorgungskonzept der elektrischen Antriebssysteme sowie einer engen Vernetzung aller Steuerungskomponenten mit einer institutseigenen BigData-Analyse-Plattform können unterschiedlichste Use-Cases, nicht nur aus dem Themenfeld der Industrie 4.0 adressiert werden. Ebenfalls besteht an der vorhandenen Anlage die Möglichkeit Schulungen durchgeführt werden.
Spezifikationen
- SCARA-Roboter
- Delta-Picker mit Transportbändern
- Knickarmroboter mit Linearachse
- Hochregalbediengerät
Roboterkinematiken an der Modellproduktionsstraße
-
SCARA-Kinematik
Der SCARA-Roboter (Abkürzung für engl. Selective Compliance Assembly Robot Arm) ist ein horizontaler Gelenkarmroboter. Der SCARA verfügt über eine serielle Kinematik mit vier Segmenten und vier Freiheitsgraden. In Rahmen des Projektes der IMES Produktionsstraße wird der Roboter für eine Pick-and-Place Aufgabe verwendet. Dabei sollen Bauklötzchen von einer von drei Rutschen aufgenommen und auf einer auf einem Förderband liegenden Palette abgelegt werden. Das Aufnehmen und Ablegen der Bauklötze erfolgt mit Hilfe eines Pneumatik-Greifers mit zwei Fingern, der an der letzten Achse des Roboters montiert ist.
![]()
![]()
![]()
-
Delta-Picker mit Transportbändern
Als grundliegende Anforderung soll der Delta-Roboter Werkstücke (Sterne) von einem Förderband aufnehmen und in Bauklötze auf dem anderen Förderband platzieren. Das Auf- und Ablegen der Sterne erfolgt mit Hilfe eines Pneumatik-Saugers, der am Endeffektor montiert ist.
Förderband 1:
- Ausfahren einer Palette aus dem Magazin
- Palette fährt zur ersten Lichtschranke
- SCARA bestückt die Palette mit Bauklötzen
- Palette fährt weiter bis zur zweiten Lichtschranke
- Delta setzt die Sterne auf die Bauklötze
- Palette fährt weiter zur dritten Lichtschranke
- Das Regalbediengerät (RGB) nimmt die Palette auf und sortiert sie in das Regalsystem
Förderband 2:
- Stern wird über Rutsche auf das Förderband 2 eingeworfen
- Detektion der Sternlage durch ein Kamerasystem
- Greifen des Sterns im Arbeitsraum des Deltaroboters
![]()
![]()
![]()
-
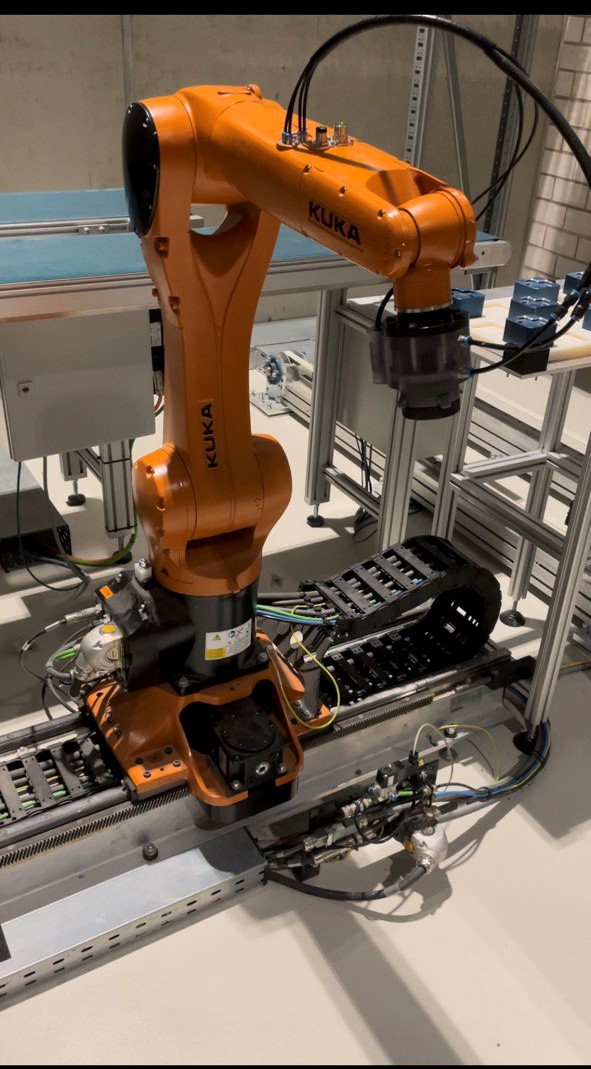
Knickarmroboter mit Linearachse
Nachdem das Regalbediengerät die Palette auf den Tisch gelegt hat, wird ein Kuka-Arm-Roboter mit 6 Freiheitsgraden und einer linearen Achse eingesetzt, um die gefüllte Palette vom Tisch an einen anderen Ort auf dem Boden zu platzieren. Die lineare Achse unterstützt den Kuka-Roboter dabei, sich vom Tisch zum zweiten Platz auf dem Boden zu bewegen.
![]()
![]()
![]()
-
Hochregalbediengerät
Nachdem die Klötze auf der Palette mit Sternen gefüllt wurden (unter Verwendung eines Delta-Roboters), werden sie bis zum Ende des Laufbands transportiert. An diesem Punkt übernimmt ein Regalbediengerät die gefüllte Palette und platziert sie entweder auf dem Tisch für den Kuka-Roboter oder legt sie auf ein Regal.
![]()
![]()
![]()


Rapid Prototyping Systeme
Am NIFE verfügt das Institut für Mechatronische Systeme über den Objet350 Connex3 Polyjet 3D Drucker.
Spezifikation
- Auflösung: X-Achse: 600 dpi; Y-Achse: 600 dpi; Z-Achse: 1.600 dpi
- Schichtstärke bis zu 16 µm
- Bauvolumen: 340 × 340 × 200 mm
- 8 Druckköpfe
- verschiedene Materialeigenschaften in einem Druckvorgang
- Materialien für den medizinischen Bereich



Metallwerkstatt
Am Institut für Mechatronische Systeme gibt es eine große und gut ausgestattete Gemeinschaftswerkstatt, die sich aus den drei Mechanik Instituten IKM, imes und IDS zusammensetzt. Die Ausstattung ist auf der Website des IDS aufgelistet: www.ids.uni-hannover.de/de/institut/unsere-metallwerkstatt/
Identifikation & Regelung
Versuchsfahrzeuge und Messsysteme
Zur Erprobung sowie zur Aufzeichnung von Messdaten verfügt das Institut für Mechatronische Systeme über zwei eigene Versuchsfahrzeuge, eine GPS-gestützte Inertialplattform, ein Datenerfassungssystem und einen Echtzeit-Computer.
Spezifikation
- Fahrzeugbezeichnung: Volkswagen Golf GTE Plug-In Hybrid Benzin
- Verbrennungsmotor: 1,4 l Hubraum, 110 kW Leistung, 250 Nm
- Elektromotor: Synchronmotor, 75 kW
- Antriebsart: Parallel-Hybrid


Spezifikation
- Fahrzeugbezeichnung: Volkswagen Touran Diesel
- Motorisierung: 1,9 l Hubraum, 77 kW Leistung
- Antriebsart: Frontantrieb, manuelles Schaltgetriebe



Spezifikation
- Faserkreiselsystem für Fahrdynamikmessungen ADMA Eco+ der Firma GeneSys
- GPS- und Kalman Filter-gestützte Messaufnahme
- Messungen von Beschleunigungen und Drehraten
- Finanziert durch das BMWi


Spezifikation
- Speedgoat Baseline Target-PC
- Echtzeit-Anwendung von Simulink Modellen
- CAN-Board



Spezifikation
- Dewesoft Data Aquisition System (DAQ)
- Aufzeichnung von Messdaten im Fahrzeug in Echtzeit
- Analoge Eingänge
- CAN-Eingänge



Spezifikation
- ETAS ES 910 Target-PC
- Echtzeit-Anwendung im Fahrzeug
- CAN-Bus Schnittstelle
Medizintechnik & Bildverarbeitung
Spezifikation
- Voxelgröße: 0,2 - 0,4 mm
- Scanvolumen 14x14x24 cm³

Autoklav
Zur Untersuchung von Anwendbarkeit zur Sterilisierung besitzt das Institut für Mechatronische Systeme den Autoklaven Vacuklav 23b+ der Firma Melag. Dabei handelt es sich um ein Sterilisationsgerät der Klasse B, welches sich für gängige Dampf-Vakuum-Sterilisationsprozesse eignet.
Spezifikation
- Stand-alone (kein Festwasseranschluss)
- Volumen: 22 Liter
- Tabletmaß: 19 x 42 x 2 cm (B x T x H)
- 230 V / 2500 W
- Gewicht: 48 kg
- Beladung: 5 kg

Optische Kohärenztomographie
Die optische Kohärenztomographie (OCT) ist eine der sich am stärksten entwickelnden und aufstrebenden optischen Bildgebungen. Mit dem "Swept Source" System der Fa. Thorlabs Inc. steht eine der modernsten Technologien in diesem Bereich zur Aufnahme von dreidimensionalen, hochaufgelösten Bilddaten zur Verfügung.
Spezifikation
- Mittlere Wellenlänge: 1325 nm
- Spektrale Bandweite: >100 nm
- Messvolumen: 10 mm x 10 mm x 3 mm
- Axiale Auflösung: ca. 10 µm
- Transversale Auflösung: ca. 15 µm



Optische Navigationssysteme
Das Institut für Mechatronische Systeme verfügt über optische Navigationssysteme, die eine 6DOF-Vermessung von Objekten im Raum ermöglichen. Es stehen drei dieser Geräte zur Verfügung: NDI Polaris, Qualisys Oqus 4 und Advanced Realtime Tracking GmbH ARTTrack2.
Spezifikation NDI Polaris und ARTTrack2
- Messgenauigkeit: 0,3mm
- Wiederholrate: 60Hz
- Messbereich: Entfernungen von bis zu 4 Metern

Spezifikation Qualisys Oqus 4
- Messgenauigkeit: bis zu 0,1mm
- Wiederholrate: 480Hz (bis zu 10 kHz bei reduziertem FOV)
- Messbereich: Entfernungen von bis zu 25 Metern

Hochfrequente Er:YAG-Laserquelle
Die diodengepumpte Laserquelle DPM-15 (Pantec Engineering/3m.i.k.r.o.n) eignet sich aufgrund ihrer Wellenlänge hervorrangend zur Ablation von wasserhaltigem Gewebe. Neben biologischem Hartgewebe (Knochen) können auch Weichgewebe durch optische Scanner in einem Volumen von 10 x 10 x 10 mm3 hochgenau mit einstellbarer Geschwindigkeit und Abtragsrate bearbeitet werden.
Spezifikation
- Ausgangsleistung bis 9 W
- Pulsfrequenz 50 Hz bis 500 Hz
- Fokusdurchmesser 400 µm
- Bearbeitungvolumen 10 x 10 x 10 mm3 (erweiterbar)



Mobile Koordinatenmessmaschine
Das Institut für Mechatronische Systeme verfügt über einen mobilen Koordinaten-Messarm vom Typ Faro GagePlus.
Spezifikation
- Volumetrische Genauigkeit: 0,025 mm
- Sphärisches Arbeitsvolumen mit 1,2 m Durchmesser

OP Mikroskop
Das Stereo-Operationsmikroskop Allegra 50 der Möller-Wedel GmbH ermöglicht Forschung mit vergrößerter Darstellung in kliniknahen Anwendungen der computer- und roboterassistierten Chirurgie und weiteren Anwendungen der Medizintechnik, wie beispielsweise experimenteller HNO-Chirurgie.
Speaifikation
- 5-stufige Vergrößerung (2x, 4x, 8x, 16x und 32x) bei f=250 mm
- Koaxiale Halogenbeleuchtung
- Stereo-Kamera-Adapter

Robotik & autonome Systeme
Hexa - parallelkinematischen Maschinen
Das Institut für Mechatronische Systeme verfügt über verschiedene seriell- und parallelkinematische Robotiksysteme. Dazu zählen industrielle Knickarmroboter sowie ein planarer 3(P)RRR Parallelroboter.

Mobiler Roboter "KMR iiwa"
Der KMR iiwa ist eine Kombination aus mobiler Plattform (KMP 200 omniMove Baujahr 2018) und Leichtbauroboter (LBR iiwa 14 R820). Der Roboter kann autonom navigieren und ist für die Mensch-Roboter-Kollaboration konzipiert. Durch seine Flexibilität ist der KMR iiwa besonders für die Integration in ein Umfeld der Industrie 4.0 geeignet.
Spezifikation
- Arm: 14 kg Nenn-Traglast
- Arm: 820 mm Reichweite
- Arm: 7 angetriebene Rotationsachsen
- Arm: Momentensensorik in allen Gelenken
- Plattform: 145 kg max. Nutzlast
- Plattform: Hinderniserkennung mit Laserscannern und Ultraschallsensoren
- Plattform: min. 8 h Batterielaufzeit

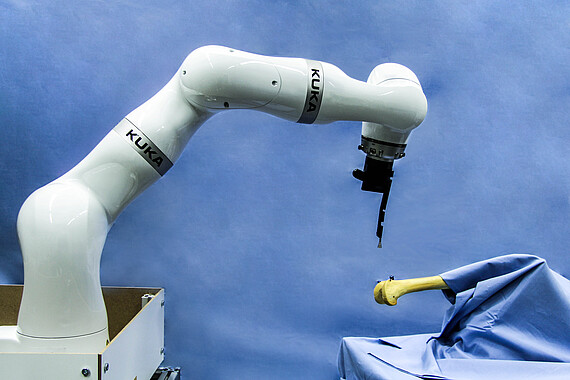
Redundanter serieller Leichtbauroboter
Der KUKA Leichtbauroboter (LBR) ist aufgrund seiner integrierten Sensorik und der redundanten siebten Achse hervorragend für die Mensch-Maschine-Interaktion geeignet. Durch sein geringes Eigengewicht von nur 15 kg bei einer Traglast von 7kg ist der Roboter energieeffizient und ortsflexibel und kann unterschiedlichste Aufgaben übernehmen.
Spezifikation
- 7 kg Nenn-Traglast
- 1,84 m3 Arbeitsraumvolumen
- 0,05 mm Wiederholgenauigkeit
- 7 angetriebene Rotationsachsen


Kompakter paralleler Präzisionsroboter
Der H-824 6-Achsen-Hexapod der Physik Instrumente (PI) GmbH & Co. KG ist aufgrund seiner Steifigkeit hervorragend für präzise Anwendungen geeignet. Durch den kompakten parallelkinematischen Aufbau mit sechs Freiheitsgraden ist der Roboter steifer als vergleichbare serielle Kinematiken und gewährleistet eine höhere Dynamik und Zuverlässigkeit.
Spezifikation
- 10 kg Nenn-Traglast
- Stellwege bis 45 mm / 25°
- 7 nm Aktorauflösung
- 0,1 µm Wiederholgenauigkeit
