Energieoptimale Trajektorienplanung
| E-Mail: | daniel.fink@imes.uni-hannover.de |
| Team: | M. Sc. Daniel Fink |
| Jahr: | 2019 |
| Förderung: | IAV GmbH |
| Laufzeit: | 12/2019 - 11/2022 |
| Ist abgeschlossen: | ja |
Im Zuge voranschreitender Automatisierung des Straßenverkehrs ist zu erwarten, dass Fahrstrecken künftig vermehrt mit Unterstützung von Fahrerassistenzsystemen zurückgelegt werden. Vor diesem Hintergrund gewinnt die Energieeffizienzsteigerung einer teilautomatisierten Fahrzeugführung zunehmend an Bedeutung.
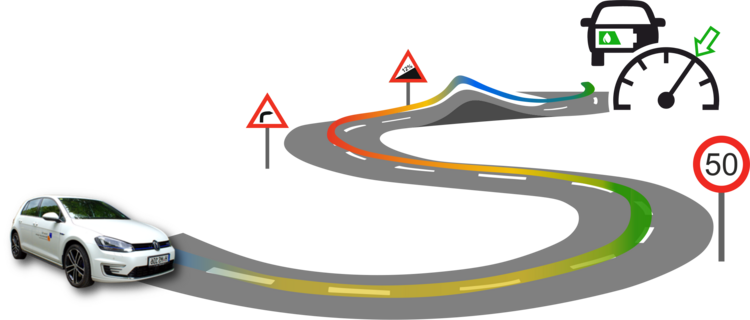
Dieses Forschungsprojekt zielt darauf ab, die teilautomatisierte Fahrzeuglängsführung durch die Planung und Optimierung einer Geschwindigkeitstrajektorie energieeffizienter zu gestalten. Dabei gilt es individuelle Fahrzeugführungspräferenzen im Zielkonflikt einer kurzen Fahrtdauer und einem niedrigen Energiebedarf zu berücksichtigen. Zur Geschwindigkeitsoptimierung werden, neben spezifischen Fahrzeugeigenschaften, prädiktive Streckeninformationen (z.B. Höhentopologie, Geschwindigkeitsbegrenzungen und Kurvenradien) für den bevorstehenden Routenabschnitt (Longrange) herangezogen. Darüber hinaus soll dynamisch bei unvorhersehbaren Ereignissen (wie z.B. vorrausfahrende Fahrzeuge oder nicht-kartierte Geschwindigkeitsbegrenzungen) auf kurzem Prädiktionshorizont (Shortrange) reagiert werden. Ziel ist die Entwicklung eines echtzeitfähigen modellprädiktiven Regelungsverfahren, mit dem die Fahrzeuglängsführung fahrerindividuell energetisch optimal erfolgt.