Parallel-kontinuierliche Manipulatoren – Egalisierung strukturindividueller Nachteile durch Kombination von Parallel- und Kontinuumsrobotern
| Team: | Dipl.-Ing. Kathrin Nülle |
| Jahr: | 2018 |
| Förderung: | Deutsche Forschungsgemeinschaft (DFG) |
| Laufzeit: | 1.1.2018-31.12.2019 |
| Ist abgeschlossen: | ja |
Parallele kinematische Maschinen (PKM) besitzen wegen der parallel angeordneten seriellen Ketten eine hohe Genauigkeit und durch basisnahe Motoren sehr gute Dynamikeigenschaften. Nachteilig an dieser Struktur ist der geringe Arbeitsraum im Vergleich zur Stellfläche, der durch Singularitäten noch zusätzlich eingeschränkt wird. Im Gegensatz dazu bieten kontinuierliche Roboter, welche anstelle von diskreten Gelenken zwischen starren Komponenten eine flexible Struktur besitzen, eine hohe Anzahl von Freiheitsgraden und ermöglichen somit eine hohe Dexterität und Manipulierbarkeit. Allerdings besitzen sie strukturbedingt eine geringe Steifigkeit.
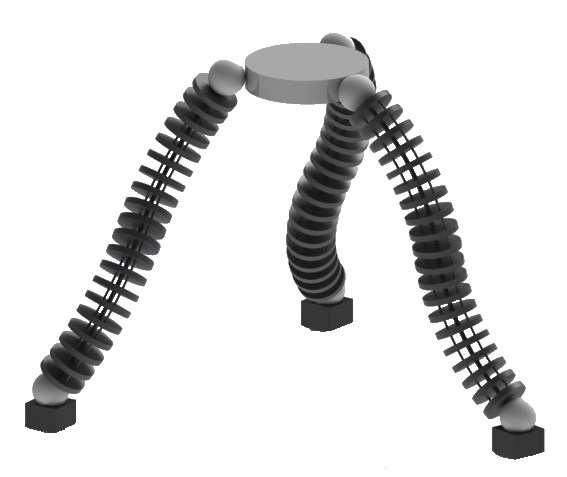
Im Rahmen dieses Projekts werden zusammen mit dem Lehrstuhl für Kontinuumsrobotik parallele Roboter mit kontinuierlichen kinematischen Ketten erforscht. Ein Rendering eines solchen Roboters ist in der Abbildung zu sehen. Ziel ist es die Vorteile von parallelen Robotern mit denen von Kontinuumsrobotern zu vereinen. Hierfür erfolgt eine allgemeine Beschreibung von parallel-kontinuierlichen Robotern bezüglich Klassifikation und Notation sowie der Analyse der Koppelmöglichkeiten zwischen den Komponenten. Darauf aufbauend erfolgt eine Modellierung der Kinematik und Untersuchung der kinematischen Leistungsgrößen, um unterschiedlichen Strukturen zu bewerten. Abschließend werden die Aussagen anhand von Funktionsmustern experimentell evaluiert.