Robotic instrument handling for surgical assistance
| Led by: | Sontje Ihler |
| E-Mail: | jorge.badilla@imes.uni-hannover.de |
| Team: | Jorge Badilla |
| Year: | 2020 |
| Duration: | 04/2020-09/2023 |
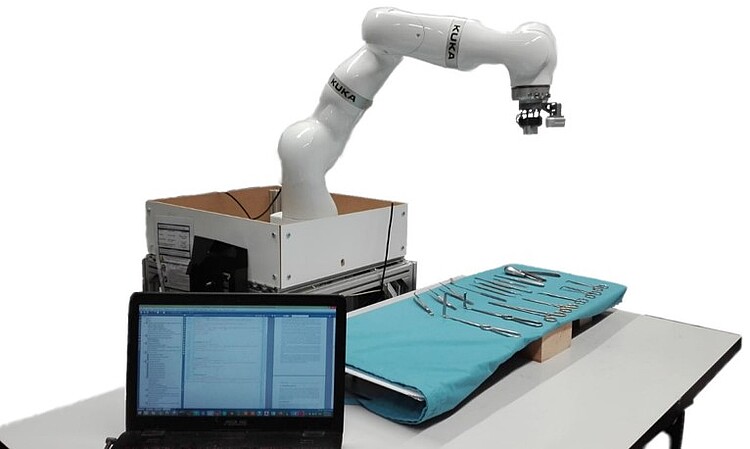
Robotic handling of surgical instruments
Surgery-assistant robots, also known as Robotic Scrub Nurses (RSN), have the potential to provide assistance during staff shortages and eventually become an economic solution. This project aims to address the main challenges associated to the development of an RSN by studying their main tasks: the detection, localization, gripping, handing, and retrieval of surgical instruments. This work is done in collaboration with the Hannover Medical School and involves the use of deep learning methods and soft-robotics technology.