Robotik & autonome Systeme
-
Vision Based Robot ControlGoal of this research project is the vision based control of the MARGe (mobile platform, see below) mounted serial manipulator. The system shall be able to recognize objects autonomously and, thereafter, grasp it due to a visual servoing control loop.Team:Year: 2007Funding: Start-up grant of the Mechatronic Center of Hannover
![]()
![]()
-
MARGeThe mobile robot MARGe (Mobile Autonomous Robot Genie) serves as experimental platform for the development and evaluation of algorithms for localization, trajectory control, and dynamic obstacle avoidance. MARGe is equipped with a variety of internal and external sensors, including encoders and laser scanner.Team:Year: 2008Funding: Start-up grant of the Mechatronic Center of Hannover
![]()
![]()
-
PaLiDA - Parallel Kinematic with Linear Direct DrivesThe experimental platform PaLiDA is used at the Mechatronic Centre of Hannover within the DFG main focus program "Production Machines with Parallel Kinematics". This project exploits, analyses, and advances the advantages thanks to a combination of a parallel kinematic structure with high dynamic linear drives. This paves the way for the future use of parallel kinematics in the industrial production with an increased productivity.Team:Year: 2008Funding: German Research Foundation (DFG)
![]()
![]()
-
Energy Optimal Trajectory Planning by Natural Motion PatternsIn continuation of research projects dealing with underactuated manipulators in which the motion of passive joints takes place due to dynamic coupling (i.e. inertial force, Coriolis force, etc.) this coupling shall be exploited in order to implement energy minimal trajectories for fully actuated systems.Team:Year: 2009Funding: German Research Foundation (DFG)
![]()
![]()
-
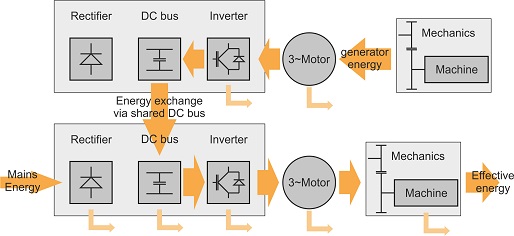
Planning of Energy-Efficient Trajectories with Utilization of Energy Storage and Energy Interchange between Electrical DrivesIn multiple-axis applications, the direct current links of the utilized frequency converters can be connected for temporary energy storage and for energy interchange between different electrical drives respectively. On this background, the research objective is the analysis of potentials for planning optimal trajectories to increase energy efficiency of such applications.Team:Year: 2010Funding: German Research Foundation (DFG)
![]()
![]()
-
Improving the Performance of Parallel Manipulators using Reconfigurable Mechanisms based on Kinematic RedundancyThe goal of this research project is to increase the singularity-free workspace of parallel kinematic structures through kinematic redundancy and simultaneously to improve their accuracy, stiffness, and dynamics. In addition to appropriate analyzing and evaluation methods, procedures for the optimal open- and closed-loop control of kinematically redundant mechanisms with a variable structures have to be developed and applied in practice.Team:Year: 2010Funding: German Research Foundation (DFG)
![]()
![]()
-
Modularly structured motion control system for robotics and handling.In this project, an easy to use, modularly structured and thus flexible platform for the control of various robotic applications is being developed. In addition to established systems, such as SCARA, articulated or delta kinematics, different interfaces offer the ability to control custom-made kinematics. The aim is to simplify the programming and commissioning of complex, multi-axis manufacturing machines.Team:Year: 2012Funding: Lenze Automation GmbH
![]()
![]()
-
Design of Energy Efficient Mechatronic Systems based on Automated Controller Synthesis and Trajectory PlanningReducing the energy consumption is a major concern in industrial production systems. One approach is recuperating the braking energy of robot axes. We therefore propose an automated methodology that consists of three parts: A scenario-based language to flexibly specify the discrete production system behavior, an automated procedure to synthesize optimal control strategies from such specifications, including PLC code generation, and a procedure for the detailed trajectory optimization.Team:Year: 2013Funding: German Research Foundation (DFG)
![]()
![]()
-
Automatic generation of optimized robotic structures for a desired taskIn order to propel the middle and small industries forward, a new method for the development of serial chain robots from a specific task is expected. The goal of the project is the automatic and global synthesis of robot structures from the design requirements.Team:Year: 2013Funding: Administrative Department of Science, Technology, and Innovation of Colombia ("Colciencias")
![]()
![]()
-
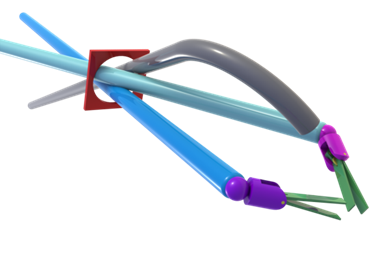
Electromagnetic bending actuator for endoscopic applicationsThe main objective of this project is aimed at the disadvantages of existing endoscopic systems which consider handling and risk of injury to the patient. The development of a new actuator, the modeling of kinematics and dynamics as well as the implementation of suitable control algorithms should compensate the aforementioned criteria. The work will be carried out in close cooperation with the Institute of Drive Systems and Power Electronics (IAL).Team:Year: 2013Funding: DFG and Caroline Herschel Program of the Equal Opportunities OfficeDuration: 2013-2019
![]()
![]()
-
"3rd Arm" - Craftsmen-Force-Assistence with adaptive Human-Machine InteractionRegarding an aging work force with higher requirements for work efficiency, a force assistence system is developed. The system is based on a mechatronic structure ("3rd arm"), which is fixed to the body of the user via a supporting construction. Apart from the physical support the system meets cognitive assistance functions. Thus, it provides force support on the one hand and on the other hand the increase in work efficiency and quality of work.Team:Year: 2014Funding: German Federal Ministry of Education and Research (BMBF)Duration: 3 years
![]()
![]()
-
Energy efficient path planning for industrial robotsThis project focuses on improving the energy efficiency of industrial robots by optimising the path planning algorithms. Intelligent path planning approaches can increase the energy efficiency by avoiding unfavourable operating points or by utilising the eletrical as well as the mechanical couplings of the axes. In order to optimise the path, it is necessary to simulate the comprehensive drive system as well as the robot's mechanics. The energy-optimal path is determined using non-linear optimisation algorithms.Year: 2015Funding: Industry
![]()
![]()
-
Auto-tuning of PID controllers for robot manipulatorsTraditional PID controller is one of the most popular control structures in industrial processes. This is due to its simplicity and robustness. These advantages qualify PID controllers to be widely used in the field of robotics. Robot manipulators, however, are highly nonlinear, highly coupled, multi-input multi-output (MIMO) dynamic systems. Tuning the PID gains for such systems is considered to be a complicated task, which is usually done using traditional or manual methods, e.g. trials and errors.Team:Year: 2017
![]()
![]()
-
Smart Control System for Increasing the Efficiency of Industrial DC MircogridsThe aim of this project is to develop intelligent control of the systems within a DC link circuit to reduce the energy absorbed by the production line. The next step is to extend the energy control system to energy storage and variable renewable energies. Emphasis is on the depth of simulation, the size of the influence of various factors, the energy storage control and the construction of an intelligent control, which actively intervenes in the process.Team:Year: 2017Funding: Bosch Rexroth AG.
![]()
![]()
-
Generation of Task Specific Robot Manipulators via Combined Structural and Dimensional SynthesisIn order to propel the middle and small industries forward, a new method for the development of serial and parallel robots from a specific task is developed. The goal of the project is the automatic and global synthesis of robot structures from the design requirements.Team:Year: 2018Funding: German Research Foundation (DFG)Duration: 2018 - 2022
-
Implementation of robot-assisted orientation systems at the Campus MaschinenbauThe Campus Maschinenbau was the University's largest new construction project and commenced its final operation in the year 2020. To faciliate orientation at the campus and answer requests of different kinds, the purpose of this project is to conceptualize and implement a robot-assisted orientation system. The robot is supposed to provide information from the central information- and room-planning system and will also work as a guide for people who require orientation at the campus.Team:Year: 2018Funding: Faculty of Mechanical EngineeringDuration: 01.03.2018 - 28.02.2023
![]()
![]()
-
Parallel-continuous manipulators - equalization of structure-specific disadvantages by combining parallel and continuum robotsThe project investigates the kinematical structure of parallel continuous robots that are parallel robots with continuous kinematic chains. The goal is to combine the high accuracy and stiffness of parallel robots with the high dexterity and manipulability of continuous robots.Team:Year: 2018Funding: German Research Foundation (DFG)Duration: 1.1.2018-31.12.2019
![]()
![]()
-
Soft Material Robotics Toolbox (SMaRT) – Methodology for the design and development of soft robot structuresRobots that can adapt to their environment due to their skin-like flexibility and are made of silicone-like materials bring many advantages, but also challenges. Research is being carried out into how a methodical approach to the design and development of these systems can be implemented. This involves modeling the dynamics on the basis of structural models and implementing test rigs to identify and validate the models generated. The controlled movement of pneumatically actuated systems represents a central challenge in this research work. Model-based control strategies are being developed, investigated and compared. The project is part of the priority program 2100 (https://www.spp2100.de/).Team:Year: 2019Funding: Deutsche Forschungsgemeinschaft (DFG)Duration: 06/2019 - 01/2025
![]()
![]()
-
Haley - Hydraulic snake-like robot for endoscopyEndoscopic procedures for diagnostics and therapy are changing medicine sustainably. Two important factors must be fulfilled for a successful intervention: Good maneuverability is necessary to reach areas that are difficult to access. In addition, the intervention in the target area requires high structural stiffness in order to withstand manipulation forces and provide the doctor with a stable working platform. However, today's endoscopes cannot fulfill both requirements at the same time. Either purely rigid or purely flexible endoscopes are used, and stiffenable mechanisms are extremely rare - even in research. As a bridge between flexible and rigid robots, a hydraulically actuated, snake-like endoscope will be investigated in the HALEy project.Team:Year: 2020Funding: Deutsche Forschungsgemeinschaft (DFG)Duration: 10/2020-04/2023
![]()
![]()
-
Robot-assisted In-situ InspectionIn order to avoid expensive disassembly of engines in aviation technology, boroscopes are used to inspect the blades inside a turbine. The aim of this research project is to develop a new type of continuum robot that enables the turbine blades to be examined using a fringe projection system at the end effector and replaces the rigid boroscopes previously used.Team:Year: 2020Funding: Bundesministerium für Wirtschaft (BMWi)Duration: 01.03.2020 - 31.12.2021
![]()
![]()
-
Human-Robot Collaboration with Parallel Kinematic MachinesWithin the project funded by the German Research Foundation, investigations are being conducted into how safe human-robot collaboration with parallel kinematic machines can be carried out. The main aspect of the research project is the detection of collisions and clamping between the human and the robot structure, as well as an appropriate reaction to them. This requires an analysis of clamping dangers and design measures, detection and reaction methods built on this analysis. Based on the research, danger-reducing collision and clamping reactions are determined. For the technical implementation of reactions to clamping and collision, observers are used that filter and merge available measured signals such as motor current and joint angle in a suitable form. In addition, the dynamic behavior of the robot with the human is controlled in order to reduce the forces from advance in the case of clamping and collision. The researched methods and procedures are implemented and validated on real parallel kinematic machines.Team:Year: 2021Funding: Deutsche ForschungsgemeinschaftDuration: 03/2021-09/2027
![]()
![]()
-
Entwicklung eines automatischen Systems zur präzisen, mechanischen Unkrautbekämpfung im Bio-Gemüsebau (AMUN)Durch Verunkrautung entstehen im Bio-Gemüse-Anbau regelmäßig teils erhebliche Ernteeinbußen. Ein zielführender Anbau erfordert oft hohen Personaleinsatz, um die Unkräuter nahe der Nutzpflanzen in Handarbeit zu jäten. Je nach Kulturpflanze resultieren zum Teil deutliche Mehrkosten gegenüber Produkten aus der konventionellen Landwirtschaft, in der oft umstrittene Herbizide eingesetzt werden. In diesem Projekt wird ein mobiles System entwickelt, das Unkrautpflanzen auf dem Feld kamerabasiert identifiziert, lokalisiert und gezielt vernichtet. Kernaspekte der Projektaufgaben am imes stellen die Synthese einer auf die Aufgabe angepassten Roboterkinematik zur Werkzeugführung, sowie die Entwicklung leistungsfähiger Algorithmen zur echtzeitfähigen Bahnplanung unter anspruchsvollen Umgebungsbedingungen dar. Zudem werden in diesen Bereichen verschiedenste Entwicklungen und Forschungstätigkeiten angestrebt, um die Bearbeitungsgüte und -geschwindigkeit zu maximieren und somit eine wirtschaftliche Alternative zu realisieren.Team:Year: 2021Funding: Bundesministerium für Ernährung und Landwirtschaft (BMEL)Duration: 07/2021-12/2024
![]()
![]()
-
roboterfabrikIn order to establish Hanover as a leading venue for robotics, the project roboterfabrik was launched as a cooperation between Region Hannover, Leibniz Universität and Roberta Regiozentrum Hannover. The roboterfabrik pursues a continuous approach for the education of so-called Robotic Natives, spanning from school to university. Educational programs in robotics for career guidance and for company employees are also offered.Team:Year: 2023Funding: Region HannoverDuration: 01/2023-12/2025
![]()
![]()









































Identifikation & Regelung
-
Time-Optimal Control of Electromechanical ActuatorsSeveral electromechanical actuators are used for a exhaust gas recirculation in diesel engined passenger vehicles. These actuators regulate the exhaust gas ratio with a high dynamical behavior. To account for the bounded power supply different model based control concepts are implemented within this research projectFunding: IAV GmbH GifhornDuration: 11/2012-10/2013
![]()
![]()
-
Semi-Active Engine MountingAt the Mechatronic Center of Hannover, a semi-active engine mounting was developed which is based on the magnetic reluctance force principle and controls the contact force of friction bellows. Through the variation of the perpendicular force the friction force (i.e. the damping force) can be controlled according to the operation condition.Team:Year: 2005Funding: Industry
![]()
![]()
-
Online Friction EstimationThe further development and optimization of both car safety and control systems requires precise knowledge of process performance and parameter dependency of relevant system parameters. Therefore, these parameters must be measured using appropriate sensors, estimated or derived from existing parameters and system data. A particularly important parameter for the development of steering and control systems for motor vehicles is the friction coefficient between the tires and the road. This project is carried out in cooperation with an automotive component supplier company and examines the feasibility of friction coefficient prognosis in automobiles on the basis of a multi sensor concept. The main focus of the project lies in the automotive technique, measurement technology, and digital signal processing.Team:Year: 2005Funding: Industry
![]()
![]()
-
Autonomous Friction Measuring PlatformThe investigation of friction between tires and driving surface is complicated due to the complexity of the tire properties and the interactions with chassis and drive chain. In order to tackle this problem an electrically driven autonomous friction measuring platform was developed in close cooperation between the Mechatronic Centre of Hannover and the Institute of Mechanics.Team:Year: 2008Funding: German Research Foundation (DFG)
![]()
![]()
-
Modelbased analysis of electrical drive systemsElectrical drive systems are classical mechatronic systems, consisting of power electronics, three-phase motor, mechanical load, and signal processing. The time constants of these systems vary in several orders of magnitude. Because of this, a lot of work is done in order to describe and optimize the behavior of each subsystem disregarding the interaction between the subsystems. For further optimization of electrical drive systems it is necessary to describe the behavior of the complete system, which is goal of this project.Team:Year: 2010Funding: Lenze Automation GmbH
-
Electromagnetically actuated PunchThe challenge of this research joint research project with the institute of metal forming and metal forming machines is the design and control of an electromangetically actuated punch. This drive concept allows the adaption of the cutting process and, therefore, gives the possibility to compensate oscillations and tracking errors during the cut. Thus, a higher stroke rate, better quality of the produced elements, and lower tool wear level of the die can be achieved. Up to now, rates up to 50 strokes per second and cutting forces up to 10 kN were reached. Thanks to the direct drive concept a very compact construction is possible.Team:Year: 2010Funding: German Research Foundation (DFG)
![]()
![]()
-
Active Manipulation of the Abrasion of the Tool in External Cylindrical Plunge GrindingChatter vibrations are still a problem for the handling of high precision systems in manufacturing, e.g. they are limiting the performance of these machines. To avoid chattering caused by abrasion of the tool true running cycles are frequently needed nowadays. The goal of this project is to build up an active damping with an electromagnetical actuator. The actuator leads in additional forces to realize the damping.Team:Year: 2011Funding: German research Foundation (DFG)
![]()
![]()
-
On-Line identification of control relevant system parameters electrically driven mechanical systemsThe primary objective of this research project is to determine the main parameters of an electric drive system coupled with mechanics, without use of special trajactories and without additional sensors but by observing the identifiability of the parameters on the fly. The basis is a real-time model of the mechatronic system.Team:Year: 2011Funding: Forschungsvereinigung Antriebstechnik (FVA)
![]()
![]()
-
Vehicle Vibration Analysis and CompensationA current project at imes is dealing with vehicle oscillations in automobiles. The research plan aims to find and analyze causes of vibration in the vehicle, in order to take appropriate measures – control strategies – to reduce or avoid vibrationsTeam:Year: 2011Funding: IAV GmbH
![]()
![]()
-
Development of a Miniaturized, Electromagnetically actuated PunchIn this joint research project with the institute of metal forming and metal forming machines a small, efficient electromagnetically actuated punch for cutting thin metal sheets is developed. By exciting the mass-spring-system specifically at its resonance frequency a compact, efficient high speed punch machine is optained, saving space, energy and time.Team:Year: 2014Funding: German Research Foundation (DFG)
![]()
![]()
-
Robust estimation of vehicle's side-slip angle, based on sensitivity-based parameteradaption and nonlinear observer structuresA resent project at the Institute of Mechatronic Systems adresses the estimation of relevant parameters and states of lateral dynamic systems in vehicle dynamics. Therefore different modelbased observers, based on sensitivity-based parameteradaption are realised to ensure a robust Estimation.Team:Year: 2014
![]()
![]()
-
Analysis of vehicle drive-train vibrationsA current project is the analysis of vehicle drive-train vibrations in the powertrain of a passenger car. The aim of the research project is to analyse individual phenomena and identify their causes. This knowledge can be used in order to find suitable software or hardware measures that reduce or avoid this vibrations. This work is being carried out as part of an industrial project with IAV GmbH.Team:Year: 2015Funding: IAV GmbH
-
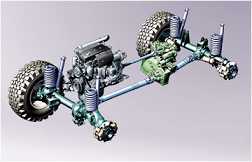
iTracC - Intelligent Traction ControlThe goal of the iTracC project is to increase driving safety in vehicles with electrified powertrains by optimizing traction control based on adaptive powertrain and friction models.Team:Year: 2015Funding: Bundesministerium für Wirtschaft und Energie (BMWi)
![]()
![]()
-
Remote Mechatronics ChallengeRemote Laboratories allow the control and observation of a real test bed via the Internet. Thus, lecture contents can be deepened and applied to real test beds. In addition to the permanent availability, the limitation of defined parameter of the system is a great advantage over classical laboratory concepts.Team:Year: 2016Funding: Studienqualitätsmittel
![]()
![]()
-
Online-Identification of control parameters in electric drives for parameter tracking IIThe main goal of the project is the identification of the main parameters for electric drives with elastically coupled mechanics without additional sensors. This is achieved firstly with dedicated identification trajectories and secondly during operation by observing the parameter identifiability with respect to the features of the trajectory. The basis is a mechatronic model of the overall mechatronic system.Led by: Prof. Dr.-Ing. Tobias OrtmaierTeam:Year: 2017Funding: Arbeitsgemeinschaft industrieller Forschungsvereinigungen „Otto von Guericke“ e.V. (AiF)Duration: 07/2017-01/2020
![]()
![]()
-
simTrailer - Complete, Model-based State Monitoring of TrailersIn the simTrailer project, online-capeable methods for model-based state monitoring of trailers are being developed to ensure the most efficient use of sensor technology.Team:Year: 2017Funding: BPW Bergische Achsen KG
![]()
![]()
-
RoCCl - Road Condition CloudAs part of the DFG-funded project RoCCl, a time-varying map, the Road Condition Cloud, is developed in cooperation with the Institute of Automotive Engineering of the TU Braunschweig. Therefore the road condition with additional confidence will be estimated by probability-based data fusion of various heterogeneous information from onboard and environmental sensors and transferred to the card. The communication with the RoCCl thus offers the possibility to correctly initialize driver assistance systems with regard to the current road condition at any time.Team:Year: 2018Funding: Deutsche Forschungsgemeinschaft (DFG)Duration: 02/2018 - 01/2021
-
Condition Monitoring of nonlinear plants in the automation industryThe progressive networking of industrial plants provides an increasing amount of data that is available in operation. It is usually no longer possible for humans to oversee this amount of information and to draw knowledge from it. With the development of increasingly powerful processors, machine learning methods have come into focus for this application. In this project, the existing procedures, which are mostly based on physical models, are to be complemented in order to enable comprehensive monitoring. The focus is on nonlinear systems that are difficult to describe using physical models.Team:Year: 2019Funding: Lenze SEDuration: 10/2018 - 09/2022
![]()
![]()
-
Planning and Optimization of Vehicle Speed TrajectoriesRegarding the growing in automation of road traffic, prospectively driving distances will be increasingly covered with the support of driver assistance systems in the future. Against this background, increasing the energy efficiency of partially automated vehicle guidance is becoming increasingly important. This research project aims to make semi-automated vehicle guidance more energy-efficient by planning and optimizing a speed trajectory. In doing so, individual vehicle guidance preferences must be taken into account in the conflicting goals of a short travel time and a low energy demand. In addition to specific vehicle characteristics, predictive route information (e.g. altitude topology, speed limits and curve radii) for the upcoming route section (long range) is used for speed optimization. In addition, it is intended to dynamically react to unpredictable events (such as vehicles driving ahead or unmapped speed limits) on short prediction horizons (short range). The goal is the development of a real-time capable model predictive control method, with which the vehicle longitudinal control is performed energetically optimal for each individual driver.Team:Year: 2019Funding: IAV GmbHDuration: 12/2019 - 11/2022
![]()
![]()
-
Automated commissioning of electrical drive trains - Use of temporary commissioning sensorsIn order to gain detailed models for the automated design of feedback and feedforward control, prior knowledge can be combined with structure and parameter identification in various ways. It is currently already possible to identify models of electric drives by means of experiments and to use them for control design, Kalman filtering, online state and parameter estimation, etc. The problem remains that the uniqueness of the structure identification is not always given. As a possible solution, temporary commissioning sensors could be used, such as load-side position sensors, accelerometers, strain gauges, yaw rate sensors, and so on. However, little research has been done on how the position, type and quality of the temporary sensors contribute to solving the ambiguity problem and to improving the accuracy of the models. In addition, there are hardly any approaches for the systematic assessment of structure distinguishability. Research objectives: 1.) Higher quality and robustness of the techniques from previous projects due to temporary commissioning sensors 2.) Reduction of commissioning time by identification of the mechanical plant 3.) Commissioning box (low-cost hardware, or smartphone app) 4.) Broad field of application through automatic selection of the model structure 5.) Evaluation of the benefits of temporary commissioning sensors The temporary sensor can be reused after commissioning on other testbeds, or otherwise the expenses are affordable, as low-cost hardware is used. The methods developed are to be validated on various testbeds and integrated into the e-Workbench (FVA 827)Led by: Prof. Dr.-Ing. Tobias OrtmaierTeam:Year: 2020Funding: FVADuration: 02/2020-02/2021
![]()
![]()
-
Automated Control Design based on (partly) automatically generated, Control-otpimal ModelsModel-based control design enables objective, reproducible controller settings and, if required, online parameter adjustment. The controller is tuned according to simple calculation rules or by means of simulations without costly experiments. The difficulty, however, is to determine the appropriate model for a given system. When modeling, it is often not clear which physical effects must be taken into account in the model and thus in the model-based controller, or which effects can be neglected, e.g. elasticity, friction, dead time, slack. The decision on a suitable control concept (e.g. phase-lead network vs. notch filter, ...) also requires a lot of expert knowledge. In this project, (partially) automated models are to be selected and model-based controllers designed. Criteria such as maximum dynamics and minimization of the overshoot lead to different parameterizations. On the basis of these and other application-dependent criteria that can be specified by the user, an overall concept for the model and controller should be generated. As a result, a significantly reduced commissioning time can be expected with comparably good controller properties. The evaluation of the models for the model selection must be carried out based on control engineering criteria. This is in contrast to commonly used methods such as cross-validation and information criteria. Possible approaches arise from the area of model predictive control.Led by: Dr.-Ing. Hans-Georg JacobTeam:Year: 2021Funding: Forschungsvereinigung Antriebstechnik (FVA)Duration: 03/2021-02/2022
![]()
![]()
-
RekuTrAxZiel des Projektes RekuTrAx ist die Entwicklung einer hochintegrierten Rekuperationsachse für LKW-Trailer. Rekuperation, die Rückgewinnung von elektrischer Energie bei einem Bremsvorgang, ist eine Technik, die für die Reduktion des Energieverbrauchs von Fahrzeugen genutzt wird. Der elektrische (Hilfs-)Antriebsstrang erlaubt direkt eine Rekuperation, ohne dass zusätzliche Hilfsmittel genutzt werden. Anders sieht es bei Fahrzeugen aus, die mit fossilen Brennstoffen oder Brennstoffzellen betrieben werden. Hier ist eine Rekuperation direkt über den Antriebstrang nicht möglich. Dieser Ansatz hat bei LKW-Trailern aufgrund der hohen kinetischen Energie besonders hohes Potenzial, Ziel ist es daher, die Rekuperationsachse eines LKW-Trailer unabhängig von der Zugmaschine nutzbar zu entwickeln. Das Projekt wird in Zusammenarbeit mit dem KIT sowie den Unternehmen REFU Drive GmbH und BPW Bergische Achsen KG bearbeitet. Die Schwerpunkte des imes liegen bei der Entwicklung eines intelligenten Energiemanagements sowie dem Condition Monitoring.Team:Year: 2022Funding: BMWKDuration: 08/22 - 07/25
![]()
![]()
-
State estimation at low vehicle speedThis research project in cooperation with IAV in Gifhorn aims to improve the kinematic state estimation for battery electric vehicles in the low speed range. For this purpose, estimation methods are to be developed, with which the velocity of the vehicle's center of gravity can be determined from the rotational speed of the electric motor, even at low speeds. Parameter variations and aging effects of the vehicle components as well as varying environmental conditions will be taken into account in order to ensure a reliable estimation of the state over the entire service life of the vehicle, regardless of the area of application. In addition, it is important that the estimation method can be easily transferred between different battery-electric drive concepts in order to keep the application effort for parameterization and approval processes as low as possible.Team:Year: 2024Funding: IAVDuration: 05/2024-04/2027
![]()
![]()































Vernetzte Systeme & maschinelles Lernen
-
Process Monitoring in Production (ProMoPro)Within this ERDF-funded project, universal tools and methods for the digitalization of production plants with high energy consumption will be created. The comprehensive acquisition of heterogeneous plant and process data enables the partitioning of the entire process into suitable sub-processes, their description through meaningful characteristics and the learning of mathematical models in order to describe the effects of the sub-processes on various target parameters (e.g. product quality and energy consumption).Team:Year: 2018Funding: ERDF (European Regional Development Fund)Duration: 3 Jahre
![]()
![]()


Medizintechnik & Bildverarbeitung
-
Mini-Projector based Augmented Reality for medical applicationsFor the purpose of optimizing the presentation of information, augmented reality approaches are the subject of current research. In the field of medical technology, the goal is the visualization of data directly in the surgeons field of view. This approach is based on a simultaneous representation of reality, in this case the patient, and additional visual information. Using a mini-projector and an optical navigation system, a handheld projection device was built up, enabling the projection of anatomical structures as well as navigation instructions in real time directly onto the surface of the patient.Team:Year: 2010
![]()
![]()
-
Integration of an OCT in a Medical Navigation SystemThere is an increasing need of high accuracy of mechatronic assistance systems in the field of minimal invasive surgery. Since standard systems do not satisfy the accuracy requirements, we are developping in cooperation with the Institute of Measurement and Automatic Control and the department of otolaryngology of the Medical School Hanover a mechatronic assistance system which includes an optical coherence tomograph (OCT). High accurate positioning of a robot is possible with the information of this sensor on the basis of multimodal image registration of preoperative CT- and intraoperative OCT-data.Team:Year: 2010Funding: German Research Foundation (DFG)
![]()
![]()
-
GentleCIThe goal of this project is to design innovative, steerable electrodes in order to allow for a contactless and thereby riskless insertion into the spiral-wound cochlea. This aim is achieved by making use of shape memory micro-actuators, which take the desired shape dependent on the patient's body temperature. The project is carried out in cooperation with the department of otolaryngology of the Medical School Hannover (MHH).Team:Year: 2010Funding: BMBF
![]()
![]()
-
Image-Based Automated Insertion of Cochlear ImplantsThe Institute of Mechatronic Systems developed a robot-assisted, minimal-invasive approach to the cochlea, drilling a small channel from the lateral skull base to the cochlea. In this context the problem arises to insert the electrode into the cochlea via the keyhole access, which is not manually applicable by the surgeon any more. Main target of the project is the development of an automated insertion tool to insert the electrode via the keyhole access. The project is carried out in cooperation with the department of otolaryngology of the Medical School Hannover (MHH).Team:Year: 2010Funding: German Research Foundation (DFG)
![]()
![]()
-
Objective Function Analysis during Total Knee EndoprothesisIn cooperation with the orthopaedic clinic of the MHH, the goal of this research project is the developement of an optimized implantation technique for total knee endoprotheses. The robot supports the surgeon during the manually conducted operation and allows an objective analysis of the present pathology. Therefore, the additional sensory information of the robot and a force-torque-sensor have to be interpreted and secure control algoritms must be implemented.Team:Year: 2010
![]()
![]()
-
Robot assisted surgeryThe topic of this project is the development of methods for minimally invasive surgical interventions at the lateral skull base. The goal is to increase the accuracy and safety of such interventions incorporating mechatronic assistance. The project is carried out in close cooperation with surgeons from the department of otolaryngology of the Hannover Medical School. As target application, a minimally invasive opening of the inner ear during cochlear implantation is considered. Cochlear implantation is the only efficient treatment of patients with severe to profound sensorineural hearing loss or deafness. During the intervention, an electrode array is implanted into the windings of the inner ear (cochlea) and electrically stimulates the auditory nerve. This results in a hearing impression for the patient and allows them to understand spoken language or listen to music. The surgical intervention is characterised by a high degree of complexity and required accuracy. In order to achieve the desired accuracy and improve the surgeon’s physical precision, intraoperative navigation and robotic assistance are combined in this project.Team:Year: 2011
![]()
![]()
-
Environment ChamberExternal influences on the early embryonic heart play an important role in the following cardiovascular development and the heart's efficiency. Especially in the first week of growth, a closer investigation of these relations is necessary. In cooperation with the department of Pediatric Cardiology at the Medical School Hannover (MHH) it is intended to accomplish the investigations at chicken embryos.Team:Year: 2011Funding: German Research Foundation (DFG)
![]()
![]()
-
Development of a head-mounted surgical robot for skull surgeryPrecision skull surgery requires specialized instrumentation to satisfy demanding requirements in cochlear array implantation, deep brain stimulation electrode placement and related applications. A miniaturized reconfigurable parallel kinematic mechanism which can be directly mounted on a patient’s skull is being designed, built and tested in collaboration with the department of otolaryngology of the Medical School Hannover (MHH)Team:Year: 2011Funding: German Research Foundation (DFG)
![]()
![]()
-
Robot assisted laser osteotomyLaser osteotomy is of great interest for many clinical indications. Tissue removal following well defined geometries raises questions primarily in the fields of path planning, high precision beam control, human-machine-interface and determination of cutting depth. Therefore, a system consisting of a KUKA lightweight robot (LWR), a stereo camera, an optical coherence tomograph (OCT), and an Er:YAG laser is assembled at the Institute of Mechatronic Systems in close cooperation with the KUKA Laboratories GmbH to demonstrate a possible application for robot assisted laser osteotomy.Team:Year: 2011Funding: KUKA Laboratories GmbH
![]()
![]()
-
Development of instruments for laparoscopic single-site surgeryIn laparoscopic surgery, the abdominal cavity of the patient is opened through a small incision. In the created access a laparoscope is inserted to illuminate and optically detect the internal organs and indicate it to the surgeon by an appropriate visual representation. In single-site surgery beside the laparoscope at least two other instruments for tissue manipulation are inserted through the same opening into the abdominal cavity. Where such access is located in the navel, the scar is barely visible later. However, besides the resulting good cosmetic result, the single-port laparoscopy has the advantages of a low blood loss and a short recovery time. To expand the applications for this new surgical technique medical systems are needed. This should in particular have a high mobility of the end-effector in a large collision-free workspace.Team:Year: 2011
![]()
![]()
-
µRALP - Micro-Technologies and Systesm for Robot-Assisted Laser PhonemicrosurgeryThe µRALP project is focused at advancing the state of the art in laser phonomicrosurgeries, which currently relies completely on the dexterity of surgeons who must operate through a microscope, control the laser aiming directly by hand, and deal with the associated poor ergonomics of the operating setup.Team:Year: 2012Funding: EU, FP7
![]()
![]()
-
Interface for the Integration of a Robot in an Image-guided therapy SystemWithin this cooperative project with the KUKA Laboratories GmbH the Institute for Mechatronic Systems develops a generic interface concept for the integration of the Light Weight Robot (KUKA) in an image-guided therapy system. This leads to an easier Integration of the LWR into an image-guided therapy system. The interface concept is going to be tested and validated by integrating the KUKA LWR into the MediLAB environment in the medical technology laboratory of the institute.Team:Year: 2012Funding: KUKA Laboratories GmbH
![]()
![]()
-
Endoscopy of trabecular bone for intraoperative registrationThe project iBoneRegistration explores endoscopy of trabecular bone structures (cancellous bone) for intraoperative registration in navigated bone surgery. Trabecular bone is optimally suited as features for establishing the spatial transformation between preoperative image data and the intraoperative situation.Team:Year: 2014Funding: DFG
![]()
![]()
-
Imporved Accuracy for Robot-Assisted SurgeryThe focus of this research work is the development of an assistance system for highly accurate, minimally invasive surgical procedures at the base of the skull. Procedures are being developed that are intended to achieve a level of surgical safety and precision that cannot be achieved by conventional means. In particular, this involves the placement of drilling channels for cochlear implantation using robots and optical navigation.Team:Year: 2014
![]()
![]()
-
RoboJiGPreclinical realization of a integrated, minimal-invasive cochlea implant system based on patient specific jigsTeam:Year: 2014Funding: BMBF
![]()
![]()
-
Hand-Held Projection and Measurement System for Surgical InterventionsIn Augmented reality, image overlay projection is a technique that would help the surgeons to view the underlying anatomical structures directly on the surface of the skin or organ of the patient. Within the scope of the Tailored Light Scholarship Program , a novel hand-held projector system would be developed that would allow the images of 3-D patient-specific models to be projected directly onto the surface of the organ intraoperatively without the need of intrusive hardware around the surgical scene. This would circumvent the problems of sight diversion and view reorientation from the patient, to the monitors with patient information like CT, MRI and would help the surgeons in performing the surgeries without any strain.Team:Year: 2016Funding: Lower Saxony Ministry for Science and Culture
-
Evaluation of the laryngeal adduction reflex via laryngoscopic microdroplet application and image processingIn this interdisciplinary project, a novel endoscopic system for the examination of the laryngeal adduction reflex (LAR) is being developed and tested in cooperation with the Department of Phoniatry and Pedaudiology (director: Prof. Dr. med. Dr. med. h.c. Martin Ptok) at Hanover Medical School (MHH). The LAR is triggered by the application of an accelerated droplet. A high-speed camera system is used to assess the reflex response. The integration of image processing algorithms increases the degree of automation and objectivity of the diagnostic procedure.Team:Year: 2016Funding: DFG
![]()
![]()
-
OPhonLas: OCT-controlled laser ablation for vocal fold phonationThis EFRE-funded project aims to develop a rigid, anatomically shaped laryngoscope equipped with a controllable ablation laser for laryngeal surgery. In addition to the application on resting vocal folds, a laser cut is also to be carried out during a phonation - i.e. on oscillating vocal folds. This enables the treatment of certain pathologies and makes the functional success of the therapy directly visible. The high demands on the real-time control of the laser require the fusion of stereo image data and optical coherence tomographies.Team:Year: 2017Funding: EFRE (Europäischer Fonds für regionale Entwicklung)Duration: 3 Jahre
![]()
![]()
-
Robotic instrument handling for surgical assistanceSurgery-assistant robots, also known as Robotic Scrub Nurses (RSN), have the potential to provide assistance during staff shortages and eventually become an economic solution. This project aims to address the main challenges associated to the development of an RSN by studying their main tasks: the detection, localization, gripping, handing, and retrieval of surgical instruments. This work is done in collaboration with the Hannover Medical School and involves the use of deep learning methods and soft-robotics technology.Led by: Sontje IhlerTeam:Year: 2020Duration: 04/2020-09/2023
![]()
![]()
-
AI-based image analysis in engine maintenanceThis project is part of the "Technology Initiative for Aircraft Engine Maintenance" (TinTin), which is a joint project between MTU Maintenance GmbH, Braunschweig Technical University and Leibniz University Hannover. The research focus here is on the development of innovative maintenance technologies for aircraft engines. In this project we aim to use image processing algorithms to partially automate inspection processes. Here, we focus on the damage assessment on X-ray images using neural networks.Team:Year: 2021Funding: NBankDuration: 01/2021-12/2023
-
Development of a 3D-Bioextrusion-Printer for growing individualized heart-muscle-tissue to treat failing heart syndrome (Indiheart)Within this interdisciplinary project, a manufacturing process for growing individualized heart-muscle implants for failing heart syndrome therapy is being developed in close cooperation with the University Medical Center Göttingen (director: Prof. Dr. med. Wolfram-Hubertus Zimmermann), the Max-Planck-Institute for Dynamics and Self-Organization (director: Prof. Dr. rer. nat. Eberhardt Bodenschatz), as well as the German Primate Center (director: Prof. Dr. med. vet. Rabea Hinkel). The force created by the artificial heart-muscle patch is supposed to restore sufficient blood-pumping abilities. At the imes, the research is focused on the development of a robot-based, fully sterilizable 3D-bioextrusion-printer and its controls. Main milestone within the current phase of the project is the automation of the printing process, to ensure precision and quality of the artificial heart-muscle-tissue.Team:Year: 2021Funding: Federal Ministry of Education and Research (BMBF)
![]()
![]()
-
Personalized cell therapy with iPSC-derived cardiomyocytes (TACTiC)The after-effects of a heart attack can lead to chronic heart insuffiency. New minimally invasive treatment methods inject heart stem cells into the (beating) heart to help regenerate the heart muscle tissue. In this project, a mechatronic applicator will be developed to automate these interventions. This will increase repeatability and allows for better consideration of the individual anatomical characteristics of the recipient heart. The main focus is on the design of the applicator and the high-precision positioning of the injection needle using imaging sensor technology. Further core aspects are the control of the injection depth as well as the precise volume analysis of the injected amount.Team:Year: 2022Funding: Federal Ministry for Education and ResearchDuration: 06/2022-05/2025
![]()
![]()
-
Automated production and analysis of bioartificial tissueLaboratory-grown human tissues with complex organ properties are increasingly being used in drug testing and thus make an important contribution to patient safety. At the same time, human tissue models are already replacing preclinical animal models and are demanded by regulatory authorities as alternative methods. In order to exploit the full potential as an alternative method, quality-assured automation of production and parallelization of analysis as well as a reduction in costs per data point are required. AutoOrgan_3R combines experience in the laboratory production of human tissue via so-called tissue engineering, here initially using the example of heart tissue from induced pluripotent stem cells, and process automation to help alternative methods in drug testing achieve a breakthrough.Team:Year: 2024Funding: Federal Ministry of Education and ResearchDuration: 04/24 - 03/27
![]()
![]()