Haley - Hydraulic snake-like robot for endoscopy
| E-Mail: | tim-lukas.habich@imes.uni-hannover.de |
| Team: | M. Sc. Tim-Lukas Habich |
| Year: | 2020 |
| Funding: | Deutsche Forschungsgemeinschaft (DFG) |
| Duration: | 10/2020-04/2023 |
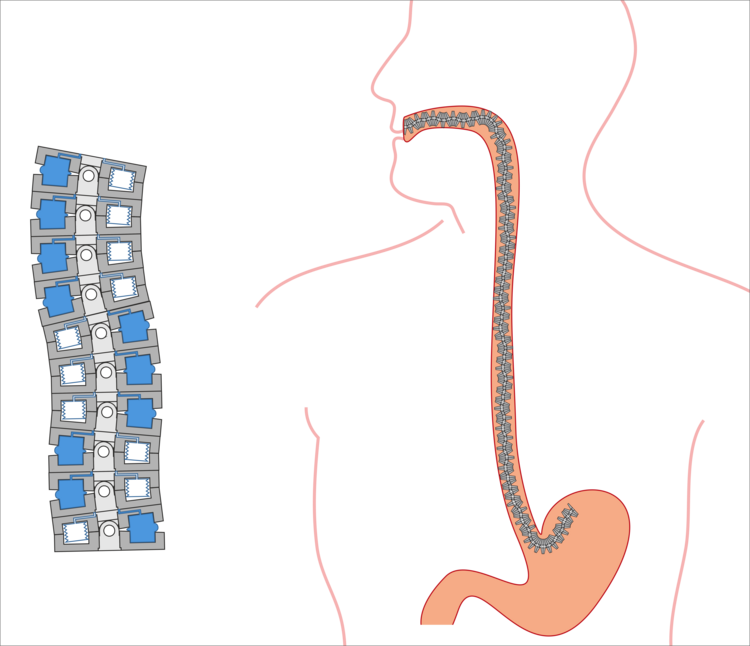
Endoscopic procedures for diagnostics and therapy are changing medicine sustainably. Interventions can now be minimally invasive and have not only become more efficient, but convalescence times have also been minimized. Two important factors must be fulfilled for a successful intervention: Good maneuverability is necessary to reach areas that are difficult to access. In addition, the intervention in the target area requires high structural stiffness in order to withstand manipulation forces and provide the doctor with a stable working platform. However, today's endoscopes cannot meet both requirements at the same time. Either purely rigid or purely flexible endoscopes are used, and stiffenable mechanisms are extremely rare - even in research. Therefore, a hydraulically actuated, snake-like endoscope will be investigated as a bridge between flexible and rigid robots.
In the foreground is a tilt actuator that combines several advantages: The hydraulic pressurization of two antagonistic bellows arranged around a tilt axis allows the adjustment of different tilt angles, which significantly increases the positioning accuracy of the endoscope. With a suitable actuator design, a clever arrangement of the bellows and control of the valves, different system stiffnesses can also be achieved. A high number of actuators can be used to achieve both temporal and locally variable flexibility, which is a basic prerequisite for anatomically optimal adaptation while providing a stable working platform for the doctor. If a biocompatible fluid and a medically acceptable system pressure are selected, the actual use in the clinic is also promising.