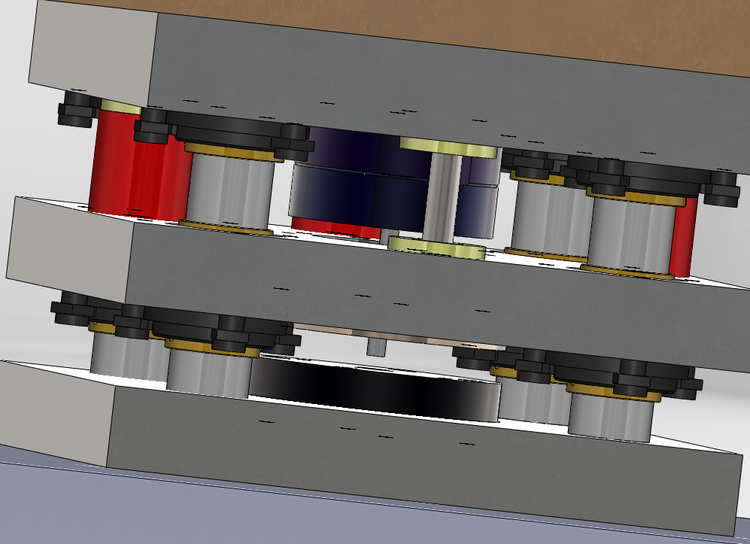
Development of a Miniaturized, Electromagnetically actuated Punch
| Team: | Dipl.-Ing Markus Ahrens |
| Year: | 2014 |
| Funding: | German Research Foundation (DFG) |
In this joint research project with the institute of metal forming and metal forming machines a small, efficient electromagnetically actuated punch for cutting thin metal sheets is developed. By exciting the mass-spring-system specifically at its resonance frequency a compact, efficient high speed punch machine is optained, saving space, energy and time.