Auto-tuning of PID controllers for robot manipulators
| Team: | M.Sc. Ahmed Zidan |
| Year: | 2017 |
| Is Finished: | yes |
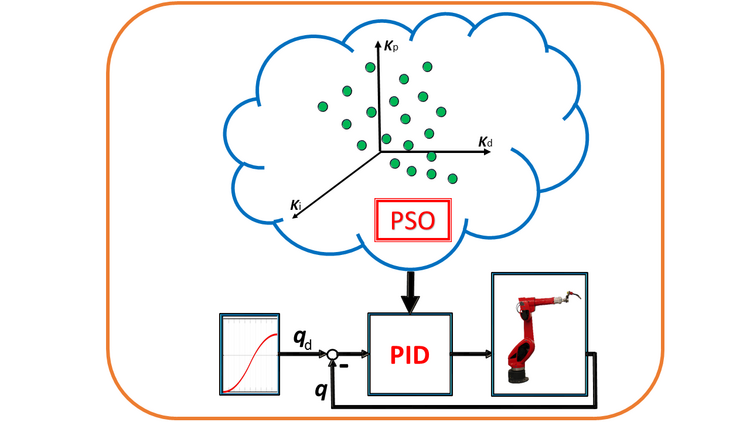
Traditional PID controller is one of the most popular control structures in industrial processes. This is due to its simplicity and robustness. These advantages qualify PID controllers to be widely used in the field of robotics. Robot manipulators, however, are highly nonlinear, highly coupled, multi-input multi-output (MIMO) dynamic systems. Tuning the PID gains for such systems is considered to be a complicated task, which is usually done using traditional or manual methods, e.g. trials and errors. The main goal of this project is to find a practical auto-tuning method for PID controllers of robot manipulators using a global optimization method. It works as a searching algorithm for the control parameters achieving the most accurate tracking of a desired trajectory. For this sake, the necessary constraints of the optimization problem must be defined in order to guarantee a safe and stable movement of the robot while searching for optimal gains. In addition to the auto-tuning method, this project aims to develop an automatic identification method of the robot dynamics. Thanks to the automatically identified parameters, a feed-forward compensation can be applied easily to improve the control structure as well as achieve an optimal tracking accuracy.