Image-Based Automated Insertion of Cochlear Implants
| Team: | Dipl.-Ing. Andreas Hussong |
| Year: | 2010 |
| Funding: | German Research Foundation (DFG) |
| Is Finished: | yes |
For patients suffering from severe to profound sensorineural hearing loss or deafness, the only effective treatment is the insertion of an electrode array into the cochlear for electrical stimulation of the auditory nerve. This so called cochlear implant (CI) enables deaf patients to receive a hearing impression and allows them to understand spoken language.
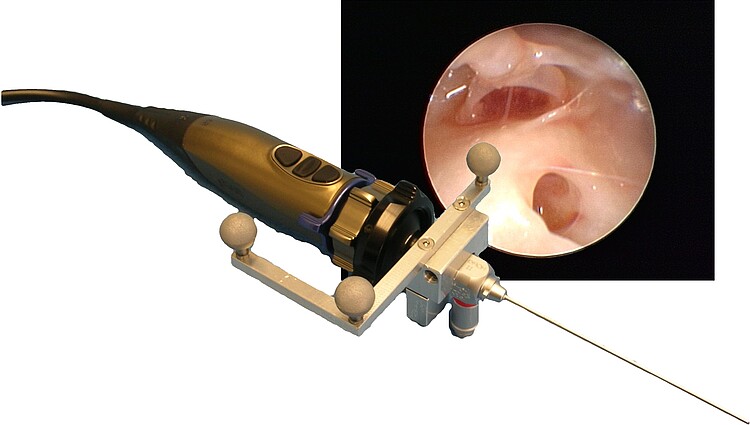
The Institute of Robotics developed a robot-assisted, minimal-invasive approach to the cochlea, drilling a small channel from the lateral skull base to the cochlea. In this context the problem arises to insert the electrode into the cochlea via the keyhole access, which is not applicable by the surgeon any more.
Main target of the project is the development of an automated insertion tool to insert the electrode via the keyhole access. An automation of the insertion in terms of actuation by linear drives with freely programmable trajectories provides numerous additional advantages. First of all it facilitates more complex insertion techniques and guarantees exact compliance with the preoperative plan during surgery. This allows individual adaptation of the insertion or even patient specific planning based upon pre-interventional imaging. Therefore it is expected that existing residual hearing abilities may be preserved during the intervention, allowing hybrid stimulation, where electrical stimulation complements natural hearing abilities.
Beside the development of the automated insertion tool methods for image based positioning of the tool are studied. Incorporating an endoscope inserted via the auditory channel the direct view onto the location of insertion is re-established. Image-based tracking methods are used to optimally position the insertion tool at the location of insertion.