Imporved Accuracy for Robot-Assisted Surgery
| Team: | M. Sc. Sebastian Tauscher |
| Year: | 2014 |
| Is Finished: | yes |
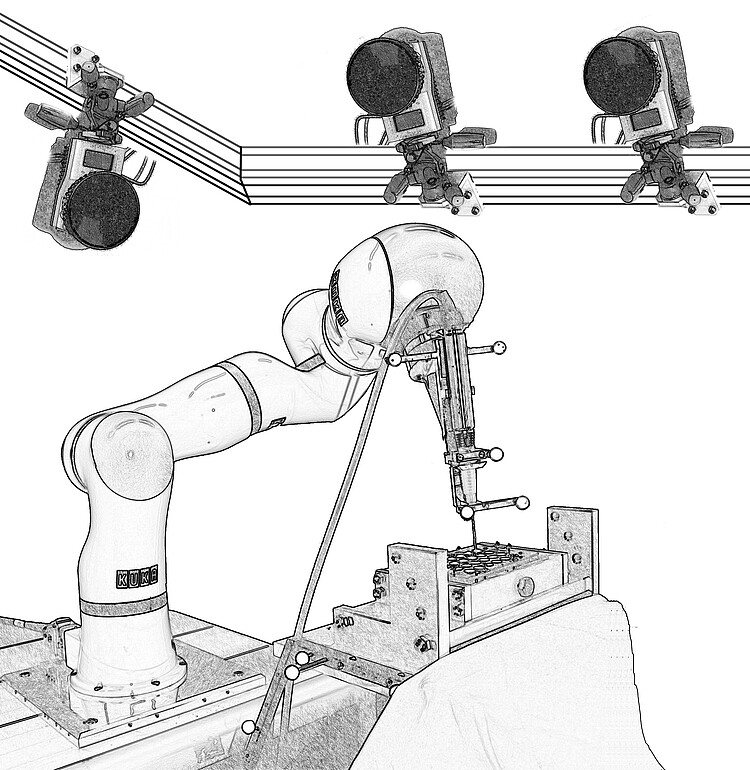
he focus of this research work is the development of an assistance system for highly accurate, minimally invasive surgical procedures at the base of the skull. Procedures are being developed that are intended to achieve a level of surgical safety and precision that cannot be achieved by conventional means. In particular, this involves the placement of drilling channels for cochlear implantation using robots and optical navigation.
In order to achieve the high demands on the accuracy of the operation, existing control approaches for medical navigation will be extended within the framework of the project and tested in experiments under a wide variety of conditions. Influences on the drilling process such as the position and orientation in the working space of the robot, the drilling speed, etc. serve as parameters for optimizing the procedure. Both the patient and the robot are equipped with so-called reference markers, so that an optical navigation system can be used to determine the relative position of the patient and the robot. For this purpose, the high-frequency localization system Oqus 4 (Qualisys AB, Sweden) is used, which allows sampling rates of up to 480 Hz at maximum resolution. For further optimization and investigation of the control or process behavior, additional sensors (e.g. acceleration sensors) are used to improve robustness and the operation result. A lightweight robot is used as the robotic system, which is characterized by force-torque sensors and the interactive human-machine interface that this enables. Besides aspects of accuracy, force-based control approaches are also investigated.