iTracC - Intelligent Traction Control
| Team: | M. Sc. Mark Wielitzka, M. Sc. Alexander Busch |
| Year: | 2015 |
| Funding: | Bundesministerium für Wirtschaft und Energie (BMWi) |
| Is Finished: | yes |
Due to the electrification of the powertrain of modern vehicles, there is considerable potential from a control engineering point of view for the improvement of existing driver assistance systems. By exploiting the increased model quality and low response times of electric motors, novel model-based methods and approaches can be developed and implemented.
The goal of the iTracC research project consists of two parts that build on each other. In the first part, an intelligent powertrain control is designed that is as self-parameterizing as possible or easy to parameterize. This requires models of the powertrain and its components with high quality. Using adaptive observer methods, modular powertrain models will be used to model and identify the powertrain structure and all dynamically relevant parameters. The powertrain control provides the driver and higher-level controls with driving dynamics parameters (sporty / comfortable / energy-saving).
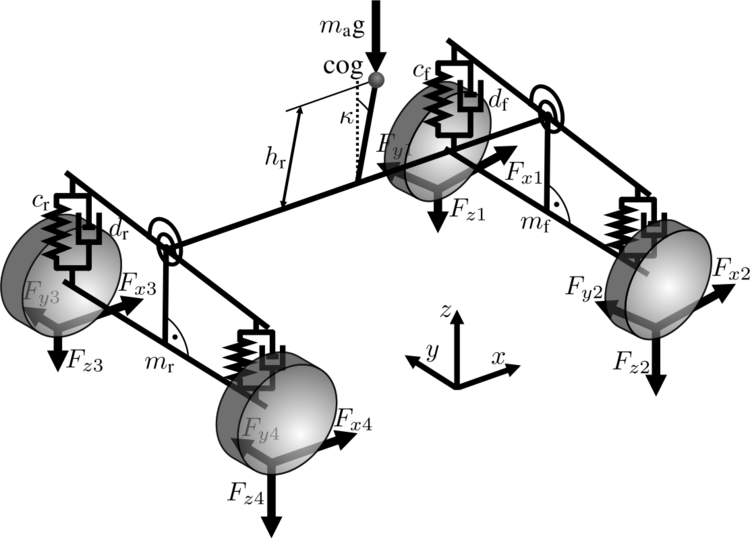
In the second part, an adaptive traction control is designed based on the developed models and suitable friction models that describe the tire-road contact sufficiently precisely so that the wheel slip is used optimally. In addition to pure longitudinal dynamics, manoeuvres with lateral acceleration are also considered. In addition to the optimized traction control, determined parameters, such as the current friction coefficient of the tire-road contact, can be passed on to other driver assistance systems.