Modularly structured motion control system for robotics and handling.
| Team: | Dipl.-Ing. Julian Öltjen |
| Year: | 2012 |
| Funding: | Lenze Automation GmbH |
| Is Finished: | yes |
The optimization of automated processes, for example in the field of industrial production and manufacturing, requires powerful hardware and software that allows complex movements in real time.
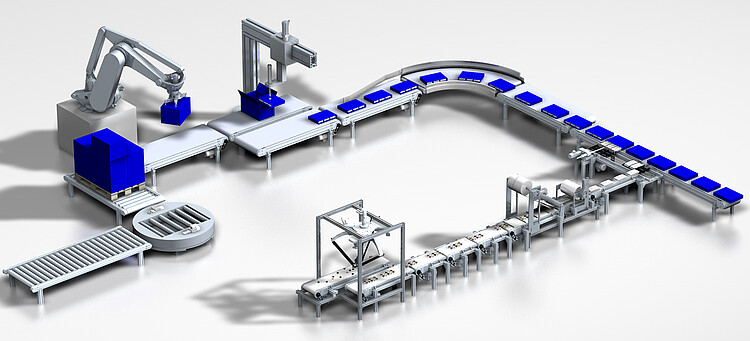
In this project, an easy to use, modularly structured and thus flexible platform for the control of various robotic applications is being developed. In addition to established systems, such as SCARA, articulated or delta kinematics, different interfaces offer the ability to control custom-made kinematics. The aim is to simplify the programming and commissioning of complex, multi-axis manufacturing machines.
Besides basic algorithms for general motion planning and optimization of individual kinematics, the cooperation of multiple machines is investigated. Collision avoidance and synchronized clock times provide time-optimal processes, while the simultaneous manipulation of an object by multiple robots allows for complex tasks to be solved.