Entwicklung eines automatischen Systems zur präzisen, mechanischen Unkrautbekämpfung im Bio-Gemüsebau (AMUN)
| Team: | M. Sc. Tim Sterneck |
| Jahr: | 2021 |
| Förderung: | Bundesministerium für Ernährung und Landwirtschaft (BMEL) |
| Laufzeit: | 07/2021-12/2024 |
AMUN – Entwicklung eines automatischen Systems zur präzisen, mechanischen Unkrautbekämpfung im Bio-Gemüsebau
Beim landwirtschaftlichen Anbau vieler Gemüsesorten beeinträchtigen ungewollte Unkrautpflanzen das Wachstum der Kulturpflanzen und erfordern daher eine aktive Regulierung. Der Gebrauch von Herbiziden ist zum einen hinsichtlich gesundheitlicher und umweltseitiger Belastung umstritten, zum anderen erschweren zunehmend Resistenzen von Unkräutern einen wirksamen Einsatz.
In der ökologischen Landwirtschaft werden anstelle chemischer Pflanzenschutzmittel alternative, ökologisch verträgliche Methoden angewandt. Während es für die Phase vor dem Austreiben der Nutzpflanzen, sowie für die Flächen zwischen den Saatreihen bereits sehr effiziente und großflächig wirkende maschinelle Methoden gibt, erfordert das Jäten zwischen den Nutzpflanzen häufig die manuelle Bearbeitung einzelner Unkräuter und verursacht hohe Personalkosten.
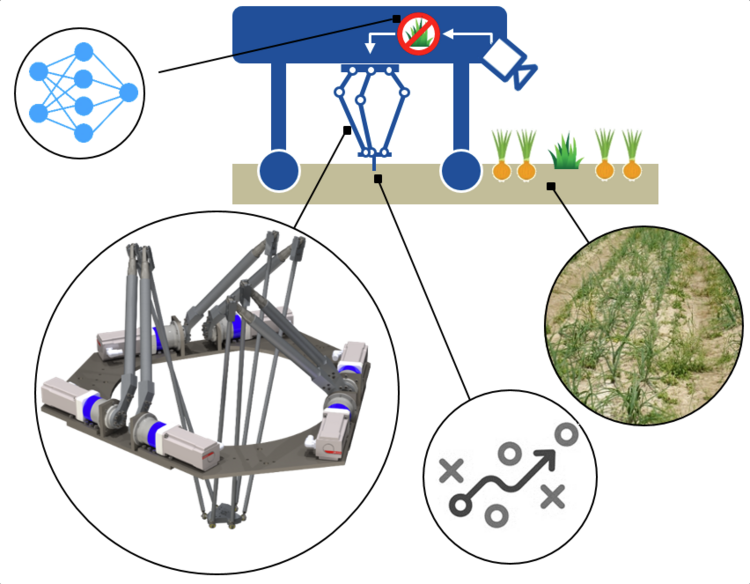
Im Projekt AMUN soll ein automatisches System zur mechanischen Unkrautregulierung entwickelt werden. Dieses soll bildbasiert sämtliche Unkrautpflanzen sicher von den Nutzpflanzen unterscheiden können, sowie ihre Position bestimmen. Ein speziell entwickeltes Jätewerkzeug wird anschließend mit einer Kinematik zu den Unkrautpflanzen geführt. Die genaue Positionierung durch die robotische Kinematik und die geringe Werkzeuggröße sollen eine zuverlässige, mechanische Zerstörung von Einzelpflanzen auch in unmittelbarer Nähe zu Nutzpflanzen ermöglichen. Im Gegensatz zu herkömmlichen Methoden führt der Prozess nur zu geringen Bodenbewegungen und senkt somit das Risiko für die Beschädigung von Nutzpflanzen und die Anregung zu neuem Unkrautwachstum. Die Unkrautzerstörung hat im fahrenden Betrieb über das Feld zu erfolgen.
Bearbeitet und erforscht werden am imes insbesondere Themen hinsichtlich der Synthese einer auf die Aufgabe angepassten Kinematik, der Ausarbeitung eines geeigneten Regelungskonzepts, der Kompensation von Störbewegungen durch Fahrbewegungen und der Entwicklung leistungsfähiger Algorithmen zur Bahnplanung.
Das Projekt wird gefördert durch das Bundesministerium für Ernährung und Landwirtschaft aufgrund eines Beschlusses des Deutschen Bundestages.