Laufende Forschungsprojekte
Robotik & autonome Systeme
-
roboterfabrikUm Hannover als einen führenden Robotik-Standort zu etablieren, wurde an der Leibniz Universität in Kooperation mit der Region Hannover und dem Roberta Regiozentrum Hannover das Gemeinschaftsprojekt roboterfabrik ins Leben gerufen. Die Roboterfabrik verfolgt einen kontinuierlichen Ansatz zur Ausbildung sogenannter Robotic Natives, der in der Schule beginnt und an der Universität fortgesetzt wird. Bildungsangebote im Bereich der Robotik zur Berufsorientierung und für Unternehmensmitarbeiter werden ebenfalls angeboten.Team:Jahr: 2023Förderung: Region HannoverLaufzeit: 01/2023-12/2025
![]()
![]()
-
Mensch-Roboter-Kollaboration mit parallelkinematischen Maschinen (MRK-PKM)Im Rahmen des DFG-geförderten Projektes wird erforscht, wie eine sichere Mensch-Roboter-Kollaboration mit parallelkinematischen Maschinen durchgeführt werden kann. Hauptaspekt des Forschungsprojektes ist die Erkennung von Kollisionen und Klemmungen zwischen dem Menschen und der Roboterstruktur, sowie eine entsprechende Reaktion darauf. Zur technischen Umsetzung von Reaktionen auf Klemmung und Kollision werden Beobachter eingesetzt, die verfügbare Messsignale wie Motorstrom und Gelenkwinkel in geeigneter Form filtern und fusionieren. Zusätzlich wird das dynamische Verhalten des Roboters mit dem Menschen geregelt, um im Klemm- und Kollisionsfall die Kräfte von vornherein zu reduzieren. Die erforschten Methoden und Verfahren werden an realen parallelkinematischen Maschinen implementiert und validiert.Team:Jahr: 2021Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 03/2021-09/2027
![]()
![]()
-
Entwicklung eines automatischen Systems zur präzisen, mechanischen Unkrautbekämpfung im Bio-Gemüsebau (AMUN)Durch Verunkrautung entstehen im Bio-Gemüse-Anbau regelmäßig teils erhebliche Ernteeinbußen. Ein zielführender Anbau erfordert oft hohen Personaleinsatz, um die Unkräuter nahe der Nutzpflanzen in Handarbeit zu jäten. Je nach Kulturpflanze resultieren zum Teil deutliche Mehrkosten gegenüber Produkten aus der konventionellen Landwirtschaft, in der oft umstrittene Herbizide eingesetzt werden. In diesem Projekt wird ein mobiles System entwickelt, das Unkrautpflanzen auf dem Feld kamerabasiert identifiziert, lokalisiert und gezielt vernichtet. Kernaspekte der Projektaufgaben am imes stellen die Synthese einer auf die Aufgabe angepassten Roboterkinematik zur Werkzeugführung, sowie die Entwicklung leistungsfähiger Algorithmen zur echtzeitfähigen Bahnplanung unter anspruchsvollen Umgebungsbedingungen dar. Zudem werden in diesen Bereichen verschiedenste Entwicklungen und Forschungstätigkeiten angestrebt, um die Bearbeitungsgüte und -geschwindigkeit zu maximieren und somit eine wirtschaftliche Alternative zu realisieren.Team:Jahr: 2021Förderung: Bundesministerium für Ernährung und Landwirtschaft (BMEL)Laufzeit: 07/2021-12/2024
![]()
![]()
-
Roboterassistierte BoroskopieUm eine teure Demontage von Triebwerken in der Luftfahrttechnik zu vermeiden, werden zur Begutachtung der Schaufeln im Inneren einer Turbine Boroskope eingesetzt. Das Ziel dieses Forschungsprojekts besteht in der Entwicklung eines neuartigen Kontinuumsroboters, der mittels eines Streifenprojektionssystems am Endeffektor die Untersuchung der Turbinenschaufeln ermöglicht und die bisher verwendeten starren Boroskope ersetzt.Team:Jahr: 2020Förderung: Bundesministerium für Wirtschaft (BMWi)Laufzeit: 03/2020 - 12/2021
![]()
![]()
-
Haley - Hydraulischer schlangenartiger Roboter für die EndoskopieEndoskopische Verfahren für Diagnostik und Therapie verändern die Medizin nachhaltig. Für einen erfolgreichen Eingriff müssen zwei wichtige Faktoren erfüllt sein: Um schwer zugängliche Gebiete erreichen zu können, ist eine gute Manövrierbarkeit nötig. Zusätzlich erfordert der Eingriff im Zielbereich eine hohe Struktursteifigkeit, um Manipulationskräfte aufnehmen zu können und dem Arzt eine feste Arbeitsplattform zur Verfügung zu stellen. Heutige Endoskope können jedoch nicht beide Anforderungen gleichzeitig erfüllen. Es werden entweder rein starre oder rein flexible Endoskope verwendet, äußerst selten sind – selbst in der Forschung – versteifbare Mechanismen anzutreffen. Als Brückenschlag zwischen flexiblen und starren Robotern soll daher ein hydraulisch aktuiertes, schlangenartiges Endoskop in dem HALEy Projekt erforscht werden.Team:Jahr: 2020Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 10/2020-04/2023
![]()
![]()
-
Soft Material Robotics Toolbox (SMaRT) – Methodologie zum Entwurf und der Entwicklung weicher RoboterstrukturenRoboter, die sich aufgrund ihrer hautähnlichen Nachgiebigkeit der Umwelt anpassen können, und aus silikonartigen Materialien gefertigt werden, bringen viele Vorteile, aber auch Herausforderungen mit sich. Es wird erforscht, wie sich ein methodisches Vorgehen beim Entwurf und der Entwicklung dieser Systeme umsetzen lässt. Dazu erfolgt die Modellierung der Dynamik auf Basis von Strukturmodellen und die Realisierung von Versuchsständen zur Identifikation bzw. Validierung erzeugter Modelle. Die kontrollierte Bewegung pneumatisch aktuierter Systeme stellt eine zentrale Herausforderung in dieser Forschungsarbeit dar. Es werden dazu modellbasierte Regelungsstrategien entwickelt, untersucht und verglichen. Das Projekt ist Teil des Schwerpunktprogramms 2100 (https://www.spp2100.de/).Team:Jahr: 2019Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 06/2019 - 01/2025
![]()
![]()












Abgeschlossene Forschungsprojekte
Robotik & autonome Systeme
-
Generierung aufgabenspezifischer Roboterkinematiken durch kombinierte Struktur- und MaßsyntheseUm den Automatisierungsprozess, insbesondere von klein- und mittelständischen Unternehmen, weiter voranzutreiben, wird im Umfang dieses Forschungsprojektes eine neue Methodik zur aufgabenspezifischen Entwicklung seriellkinematischer und parallelkinematischer Roboter erarbeitet. Ziel ist eine ganzheitliche und automatisierte Synthetisierung von Roboterstrukturen in Abhängigkeit eines benutzerdefinierten Anforderungsprofils.Team:Jahr: 2018Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 2018 - 2022
-
Parallel-kontinuierliche Manipulatoren – Egalisierung strukturindividueller Nachteile durch Kombination von Parallel- und KontinuumsroboternIm Rahmen dieses Projekts wird die kinematische Struktur von parallelen Robotern mit kontinuierlichen kinematischen Ketten erforscht. Das Ziel ist die hohe Genauigkeit und Steifigkeit von parallelen Robotern mit der hohen Dexterität und Manipulierbarkeit von kontinuierlichen Robotern zu vereinen.Team:Jahr: 2018Förderung: Deutsche Forschungsgemeinschaft (DFG)Laufzeit: 1.1.2018-31.12.2019
![]()
![]()
-
Implementierung robotergestützter Orientierungssysteme auf dem Campus MaschinenbauDer Campus Maschinenbau war die größte Neubaumaßnahme der Universität und hat im Jahr 2020 seinen endgültigen Betrieb aufgenommen. Um die Orientierung auf dem Campus zu erleichtern und Anfragen verschiedener Art zu beantworten, soll in diesem Projekt ein robotergestütztes Orientierungssystem konzipiert und implementiert werden. Ein Roboter soll sowohl Auskunft über das Informations- und Raumbelegungssystem geben, als auch als Wegbegleiter für Personen zur Erstorientierung fungieren.Team:Jahr: 2018Förderung: Fakultät für MaschinenbauLaufzeit: 03/2018 - 02/2023
![]()
![]()
-
Automatische PID-Reglereinstellung für serielle RoboterKlassische PID Regler sind aufgrund ihrer Einfachheit und Robustheit eine der am meisten verwendeten Regelstrukturen in industriellen Prozessen. Auch in dem Gebiet der Robotik ist die Verwendung von PID Reglern wegen ihrer Vorteile weit verbreitet. Roboter sind jedoch hochgradig nichtlineare und hochgekoppelte MIMO-Systeme. Daher gilt die Einstellung der Regelparameter für solche Systeme als hochkomplexe Aufgabe, die in der Regel durch traditionelle oder manuelle Methoden (z.B. durch gezieltes Ausprobieren) durchgeführt wird.Team:Jahr: 2017
![]()
![]()
-
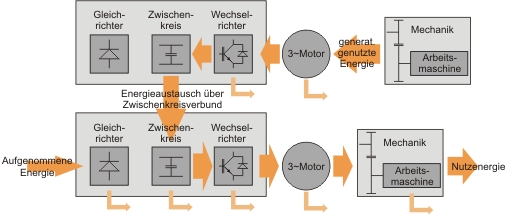
Regelung zur Effizienzsteigerung von industriellen GleichstromnetzenZiel dieses Projekts ist die Entwicklung einer intelligenten Ansteuerung der Systeme innerhalb eines Gleichstromzwischenkreis- verbunds, sodass die netzseitig aufgenommene Energie reduziert wird. Die Energiesteuerung soll im nächsten Schritt auf Energiespeicher und variable erneuerbare Energien ausgedehnt werden. Schwerpunkte sind vor allem Simulationstiefe, Große der Einflussnahme, Energiespeichersteuerung und Aufbau einer Intelligenten Steuerung, welche aktiv in den Prozess eingreift.Team:Jahr: 2017Förderung: Bosch Rexroth AG.
![]()
![]()
-
Energieeffiziente Bahnplanung für IndustrieroboterEine Möglichkeit zur Steigerung der Energieeffizienz eines Roboters besteht in der Planung energieoptimaler Bewegungen. Der Energieverbrauch wird durch verschiedene Effekte von der Bahnplanung beeinflusst, darunter z. B. betriebspunktabhängige Verluste der Antriebskomponenten sowie die elektrische und mechanische Kopplung der Antriebsachsen. Zur Optimierung der Bahn müssen daher sowohl der gesamte Antriebsstrang als auch die Mechanik betrachtet werden. Hierzu werden sämtliche Komponenten modelliert und die energieoptimale Bahn mittels nichtlinearer Optimierungsverfahren ermittelt.Jahr: 2015Förderung: Industrie
![]()
![]()
-
"3. Arm" - Handwerker-Kraftassistenzsystem mit adaptiver Mensch-Technik-InteraktionDas Projektvorhaben widmet sich der Entwicklung eines Assistenzsystems zur Unterstützung bei Arbeiten mit schweren Elektrowerkzeugen. Grundlage ist dabei eine mechatronische Konstruktion ("3. Arm"), die am Körper des Nutzers über eine Tragekonstruktion befestigt ist. Neben der physischen Unterstützung erfüllt das System kognitive Assistenzfunktionen. Somit dient das System einerseits der Arbeitserleichterung (Reduktion der auf Arme und Schulter wirkenden Kräfte) und andererseits der Steigerung der Arbeitseffizienz und Arbeitsqualität.Team:Jahr: 2014Förderung: Bundesministerium für Bildung und Forschung (BMBF)Laufzeit: 3 Jahre
![]()
![]()
-
Entwurf energieeffizienter mechatronischer Systeme durch Kopplung automatischer Steuerungssynthese und TrajektorienplanungDie Reduzierung des Energieverbrauchs ist ein großes Anliegen in industriellen Produktionssystemen. Ein Ansatz ist die Rückgewinnung der Bremsenergie von Roboterachsen. Im Rahmen dieses Projektes wird an einer automatisierte Methodik geforscht, welche aus drei Teilen besteht: Eine szenariobasierte Sprache zur flexiblen Spezifikation des diskreten Produktionssystemverhaltens, ein automatisiertes Verfahren zur Synthese optimaler Steuerstrategien aus solchen Spezifikationen, einschließlich der Generierung von SPS-Code, und ein Verfahren zur detaillierten Trajektorienoptimierung.Team:Jahr: 2013Förderung: Deutsche Forschungsgemeinschaft (DFG)
![]()
![]()
-
Automatische Generierung aufgabenoptimaler RoboterstrukturenUm den Automatisierungsprozess, insbesondere von klein- und mittelständischen Unternehmen, weiter voranzutreiben, wurde im Umfang dieses Forschungsprojektes eine neue Methodik zur aufgabenspezifischen Entwicklung seriellkinematischer Roboter erarbeitet. Ziel ist eine ganzheitliche und automatisierte Synthetisierung von seriellen Roboterstrukturen in Abhängigkeit eines benutzerdefinierten Anforderungsprofils.Team:Jahr: 2013Förderung: Administrative Department of Science, Technology, and Innovation of Colombia ("Colciencias")
![]()
![]()
-
Vollaktuierter elektromagnetischer Biegeaktor für endoskopische AnwendungenZiel dieses Projektes ist, die Nachteile bestehender Endoskop-Systeme, in Bezug auf Handhabung und Verletzungsrisiko für den Patienten, durch ein neuartiges Aktuierungskonzept zu kompensieren. Gegenstand der Untersuchung sind zunächst die Entwicklung geeigneter Aktoren, deren kinematische und dynamische Modellierung sowie die Implementierung einer geeigneten Steuerung und Regelung. Die Arbeit wird in enger Kooperation mit dem Institut für Antriebssysteme und Leistungselektronik (IAL) durchgeführt.Team:Jahr: 2013Förderung: DFG und Caroline Herschel Programm des Hochschulbüro für ChancenVielfaltLaufzeit: 2013-2019
![]()
![]()
-
Modular strukturiertes Motion-Control-System für Robotik und HandlingIn diesem Projekt wird eine leicht bedienbare, modular strukturierte und damit flexible Plattform zur Ansteuerung unterschiedlichster Robotik-Anwendungen entwickelt. Neben etablierten Systemen, wie z.B. Scara-, Delta- oder Knickarm-Kinematiken, bieten unterschiedliche Schnittstellen die Möglichkeit, individuelle Kinematiken anzusteuern. Das Ziel ist die Vereinfachung der Programmierung und Inbetriebnahme komplexer, mehrachsiger Produktionsanlagen.Team:Jahr: 2012Förderung: Lenze Automation GmbH
![]()
![]()
-
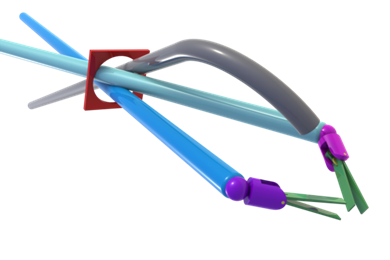
Entwicklung chirurgischer Instrumente für die Single-Port-LaparoskopieBei laparoskopischen Eingriffen wird die Bauchhöhle des Patienten durch einen kleinen Schnitt eröffnet. In den so geschaffenen Zugang wird ein Laparoskop eingeführt, um die inneren Organe auszuleuchten, optisch zu erfassen und dem Mediziner durch eine geeignete visuelle Darstellung anzuzeigen. Bei einer Single-Port Operation werden neben dem Laparoskop mindestens zwei weitere Instrumente zur Gewebemanipulation durch dieselbe Öffnung in die Bauchhöhle eingebracht. Erfolgt dieser Zugang im Bauchnabel ist die Narbe später kaum mehr zu erkennen. Neben dem daraus resultierenden guten kosmetischen Ergebnis, hat die Single-Port Laparoskopie die Vorteile eines geringen Blutverlustes und einer schnellen Genesung. Um das Einsatzgebiet für diese Operationstechnik zu erweitern werden neue medizintechnische Systeme benötigt. Diese sollen insbesondere eine hohe Beweglichkeit der Endeffektoren in einem großen kollisionsfreien Arbeitsraum besitzen.Team:Jahr: 2011
![]()
![]()
-
Planung energieeffizienter Trajektorien unter Ausnutzung von Energiespeichern und Energieaustausch zwischen elektrischen AntriebenIn Mehrachsanwendungen lassen sich die umrichterinternen Gleichstromzwischenkreise der Einzelachsen zusammenschalten, so dass hierdurch eine kurzzeitige Energiepufferung bzw. ein kontinuierlicher Energieaustausch zwischen den verwendeten Antrieben möglich ist. Auf dieser Grundlage sollen Möglichkeiten einer optimierten Trajektorienplanung zur Steigerung der Energieeffizienz untersucht werden.Team:Jahr: 2010Förderung: Deutsche Forschungsgemeinschaft (DFG)
![]()
![]()
-
Leistungssteigerung von Parallelrobotern mittels parametervariabler Strukturen basierend auf kinematischer RedundanzDas Ziel dieses Forschungsvorhabens ist es, den Bewegungsraum von Parallelkinematiken durch kinematische Redundanz zu vergrößern und gleichzeitig die Genauigkeit, Steifigkeit und Dynamik zu steigern. Neben geeigneten und aussagekräftigen Analyse- und Bewertungsmethodiken, sollen Verfahren zur optimalen Steuerung und Regelung parametervariabler Mechanismen entwickelt und praktisch angewendet werden.Team:Jahr: 2010Förderung: Deutsche Forschungsgemeinschaft (DFG)
![]()
![]()