Ongoing Research Projects
-
Personalized cell therapy with iPSC-derived cardiomyocytes (TACTiC)The after-effects of a heart attack can lead to chronic heart insuffiency. New minimally invasive treatment methods inject heart stem cells into the (beating) heart to help regenerate the heart muscle tissue. In this project, a mechatronic applicator will be developed to automate these interventions. This will increase repeatability and allows for better consideration of the individual anatomical characteristics of the recipient heart. The main focus is on the design of the applicator and the high-precision positioning of the injection needle using imaging sensor technology. Further core aspects are the control of the injection depth as well as the precise volume analysis of the injected amount.Team:Year: 2022Funding: Federal Ministry for Education and ResearchDuration: 06/2022-05/2025
-
Development of a 3D-Bioextrusion-Printer for growing individualized heart-muscle-tissue to treat failing heart syndrome (Indiheart)Within this interdisciplinary project, a manufacturing process for growing individualized heart-muscle implants for failing heart syndrome therapy is being developed in close cooperation with the University Medical Center Göttingen (director: Prof. Dr. med. Wolfram-Hubertus Zimmermann), the Max-Planck-Institute for Dynamics and Self-Organization (director: Prof. Dr. rer. nat. Eberhardt Bodenschatz), as well as the German Primate Center (director: Prof. Dr. med. vet. Rabea Hinkel). The force created by the artificial heart-muscle patch is supposed to restore sufficient blood-pumping abilities. At the imes, the research is focused on the development of a robot-based, fully sterilizable 3D-bioextrusion-printer and its controls. Main milestone within the current phase of the project is the automation of the printing process, to ensure precision and quality of the artificial heart-muscle-tissue.Team:Year: 2021Funding: Federal Ministry of Education and Research (BMBF)
![]()
![]()
-
AI-based image analysis in engine maintenanceThis project is part of the "Technology Initiative for Aircraft Engine Maintenance" (TinTin), which is a joint project between MTU Maintenance GmbH, Braunschweig Technical University and Leibniz University Hannover. The research focus here is on the development of innovative maintenance technologies for aircraft engines. In this project we aim to use image processing algorithms to partially automate inspection processes. Here, we focus on the damage assessment on X-ray images using neural networks.Team:Year: 2021Funding: NBankDuration: 01/2021-12/2023
-
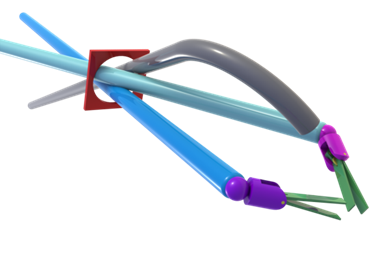
Haley - Hydraulic snake-like robot for endoscopyEndoscopic procedures for diagnostics and therapy are changing medicine sustainably. Two important factors must be fulfilled for a successful intervention: Good maneuverability is necessary to reach areas that are difficult to access. In addition, the intervention in the target area requires high structural stiffness in order to withstand manipulation forces and provide the doctor with a stable working platform. However, today's endoscopes cannot fulfill both requirements at the same time. Either purely rigid or purely flexible endoscopes are used, and stiffenable mechanisms are extremely rare - even in research. As a bridge between flexible and rigid robots, a hydraulically actuated, snake-like endoscope will be investigated in the HALEy project.Team:Year: 2020Funding: Deutsche Forschungsgemeinschaft (DFG)Duration: 10/2020-04/2023
![]()
![]()
-
Robotic instrument handling for surgical assistanceSurgery-assistant robots, also known as Robotic Scrub Nurses (RSN), have the potential to provide assistance during staff shortages and eventually become an economic solution. This project aims to address the main challenges associated to the development of an RSN by studying their main tasks: the detection, localization, gripping, handing, and retrieval of surgical instruments. This work is done in collaboration with the Hannover Medical School and involves the use of deep learning methods and soft-robotics technology.Led by: Sontje IhlerTeam:Year: 2020Duration: 04/2020-09/2023
![]()
![]()






Finished Research Projects
-
OPhonLas: OCT-controlled laser ablation for vocal fold phonationThis EFRE-funded project aims to develop a rigid, anatomically shaped laryngoscope equipped with a controllable ablation laser for laryngeal surgery. In addition to the application on resting vocal folds, a laser cut is also to be carried out during a phonation - i.e. on oscillating vocal folds. This enables the treatment of certain pathologies and makes the functional success of the therapy directly visible. The high demands on the real-time control of the laser require the fusion of stereo image data and optical coherence tomographies.Team:Year: 2017Funding: EFRE (Europäischer Fonds für regionale Entwicklung)Duration: 3 Jahre
![]()
![]()
-
Hand-Held Projection and Measurement System for Surgical InterventionsIn Augmented reality, image overlay projection is a technique that would help the surgeons to view the underlying anatomical structures directly on the surface of the skin or organ of the patient. Within the scope of the Tailored Light Scholarship Program , a novel hand-held projector system would be developed that would allow the images of 3-D patient-specific models to be projected directly onto the surface of the organ intraoperatively without the need of intrusive hardware around the surgical scene. This would circumvent the problems of sight diversion and view reorientation from the patient, to the monitors with patient information like CT, MRI and would help the surgeons in performing the surgeries without any strain.Team:Year: 2016Funding: Lower Saxony Ministry for Science and Culture
-
Evaluation of the laryngeal adduction reflex via laryngoscopic microdroplet application and image processingIn this interdisciplinary project, a novel endoscopic system for the examination of the laryngeal adduction reflex (LAR) is being developed and tested in cooperation with the Department of Phoniatry and Pedaudiology (director: Prof. Dr. med. Dr. med. h.c. Martin Ptok) at Hanover Medical School (MHH). The LAR is triggered by the application of an accelerated droplet. A high-speed camera system is used to assess the reflex response. The integration of image processing algorithms increases the degree of automation and objectivity of the diagnostic procedure.Team:Year: 2016Funding: DFG
![]()
![]()
-
Endoscopy of trabecular bone for intraoperative registrationThe project iBoneRegistration explores endoscopy of trabecular bone structures (cancellous bone) for intraoperative registration in navigated bone surgery. Trabecular bone is optimally suited as features for establishing the spatial transformation between preoperative image data and the intraoperative situation.Team:Year: 2014Funding: DFG
![]()
![]()
-
Imporved Accuracy for Robot-Assisted SurgeryThe focus of this research work is the development of an assistance system for highly accurate, minimally invasive surgical procedures at the base of the skull. Procedures are being developed that are intended to achieve a level of surgical safety and precision that cannot be achieved by conventional means. In particular, this involves the placement of drilling channels for cochlear implantation using robots and optical navigation.Team:Year: 2014
![]()
![]()
-
RoboJiGPreclinical realization of a integrated, minimal-invasive cochlea implant system based on patient specific jigsTeam:Year: 2014Funding: BMBF
![]()
![]()
-
Interface for the Integration of a Robot in an Image-guided therapy SystemWithin this cooperative project with the KUKA Laboratories GmbH the Institute for Mechatronic Systems develops a generic interface concept for the integration of the Light Weight Robot (KUKA) in an image-guided therapy system. This leads to an easier Integration of the LWR into an image-guided therapy system. The interface concept is going to be tested and validated by integrating the KUKA LWR into the MediLAB environment in the medical technology laboratory of the institute.Team:Year: 2012Funding: KUKA Laboratories GmbH
![]()
![]()
-
µRALP - Micro-Technologies and Systesm for Robot-Assisted Laser PhonemicrosurgeryThe µRALP project is focused at advancing the state of the art in laser phonomicrosurgeries, which currently relies completely on the dexterity of surgeons who must operate through a microscope, control the laser aiming directly by hand, and deal with the associated poor ergonomics of the operating setup.Team:Year: 2012Funding: EU, FP7
![]()
![]()
-
Development of instruments for laparoscopic single-site surgeryIn laparoscopic surgery, the abdominal cavity of the patient is opened through a small incision. In the created access a laparoscope is inserted to illuminate and optically detect the internal organs and indicate it to the surgeon by an appropriate visual representation. In single-site surgery beside the laparoscope at least two other instruments for tissue manipulation are inserted through the same opening into the abdominal cavity. Where such access is located in the navel, the scar is barely visible later. However, besides the resulting good cosmetic result, the single-port laparoscopy has the advantages of a low blood loss and a short recovery time. To expand the applications for this new surgical technique medical systems are needed. This should in particular have a high mobility of the end-effector in a large collision-free workspace.Team:Year: 2011
![]()
![]()
-
Development of a head-mounted surgical robot for skull surgeryPrecision skull surgery requires specialized instrumentation to satisfy demanding requirements in cochlear array implantation, deep brain stimulation electrode placement and related applications. A miniaturized reconfigurable parallel kinematic mechanism which can be directly mounted on a patient’s skull is being designed, built and tested in collaboration with the department of otolaryngology of the Medical School Hannover (MHH)Team:Year: 2011Funding: German Research Foundation (DFG)
![]()
![]()
-
Robot assisted laser osteotomyLaser osteotomy is of great interest for many clinical indications. Tissue removal following well defined geometries raises questions primarily in the fields of path planning, high precision beam control, human-machine-interface and determination of cutting depth. Therefore, a system consisting of a KUKA lightweight robot (LWR), a stereo camera, an optical coherence tomograph (OCT), and an Er:YAG laser is assembled at the Institute of Mechatronic Systems in close cooperation with the KUKA Laboratories GmbH to demonstrate a possible application for robot assisted laser osteotomy.Team:Year: 2011Funding: KUKA Laboratories GmbH
![]()
![]()
-
Mini-Projector based Augmented Reality for medical applicationsFor the purpose of optimizing the presentation of information, augmented reality approaches are the subject of current research. In the field of medical technology, the goal is the visualization of data directly in the surgeons field of view. This approach is based on a simultaneous representation of reality, in this case the patient, and additional visual information. Using a mini-projector and an optical navigation system, a handheld projection device was built up, enabling the projection of anatomical structures as well as navigation instructions in real time directly onto the surface of the patient.Team:Year: 2010
![]()
![]()
-
Integration of an OCT in a Medical Navigation SystemThere is an increasing need of high accuracy of mechatronic assistance systems in the field of minimal invasive surgery. Since standard systems do not satisfy the accuracy requirements, we are developping in cooperation with the Institute of Measurement and Automatic Control and the department of otolaryngology of the Medical School Hanover a mechatronic assistance system which includes an optical coherence tomograph (OCT). High accurate positioning of a robot is possible with the information of this sensor on the basis of multimodal image registration of preoperative CT- and intraoperative OCT-data.Team:Year: 2010Funding: German Research Foundation (DFG)
![]()
![]()
-
GentleCIThe goal of this project is to design innovative, steerable electrodes in order to allow for a contactless and thereby riskless insertion into the spiral-wound cochlea. This aim is achieved by making use of shape memory micro-actuators, which take the desired shape dependent on the patient's body temperature. The project is carried out in cooperation with the department of otolaryngology of the Medical School Hannover (MHH).Team:Year: 2010Funding: BMBF
![]()
![]()