Interface for the Integration of a Robot in an Image-guided therapy System
| Team: | M. Sc. Sebastian Tauscher |
| Year: | 2012 |
| Funding: | KUKA Laboratories GmbH |
| Is Finished: | yes |
Since the mid 1980’s research have been done in the field of computer and robot-assisted surgery. So far, just a few systems succeeded the step from the research test set up towards a FDA approved product. Besides others, the reasons are the insufficient overall accuracy as well as the often complex and time-consuming surgical workflow. Furthermore, the integration of the mechatronic assistant device into an image-guided therapy system is an important step towards a commercial success. Therefore, standards got an important part. Examples for successfully established standards in medicine are the Health Level 7 (HL7) standard and the Digital Imaging and Communication in Medicine (DICOM) standard. In addition the Integrating the healthcare Enterprises (IHE) program tries to introduce common workflows into different disciplines of medicine and identifies relevant standards for each discipline. However, Up to date there is whether a standard for robot-assisted surgery neither for the integration of devices in the operation room.
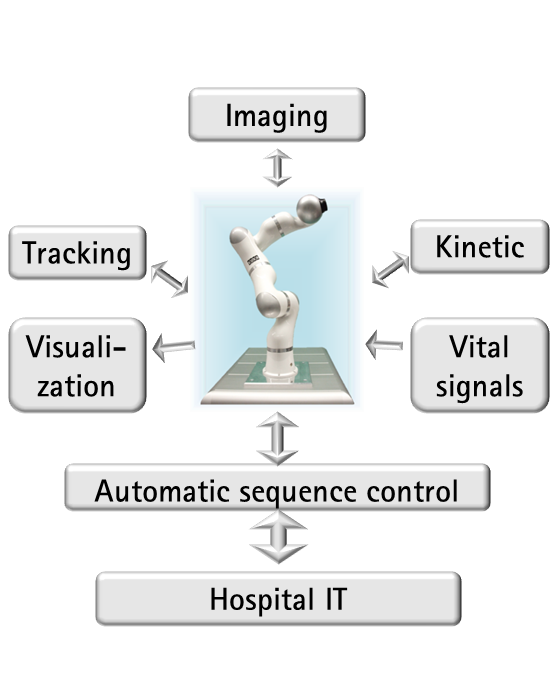
Within this cooperative project with the KUKA Laboratories GmbH the Institute for Mechatronic Systems develops a generic interface concept for the integration of the Light Weight Robot (KUKA) in an image-guided therapy system. This concept is derived from a literature review of open and proprietary interfaces as well as of existing standards in medicine. Based on these results the requirements specifications of the interfaces are derived.
As a result of this work an OpenIGTLink based interface concept for the KUKA Sunrise control of the LWR iiwa was implemented. These interfaces allow for operating a state machine on the robot control and for visualising the current robot pose. The developed software is available under a BSD-License on GitHub.
Additionally, a 3D Slicer module was developed for visualisation and state control purposes. This module is available as 3D Slicer Extension using the Extension-Manager. Tutorials on how to getting started and an introduction can be found on the module description page.